Journal Information
Title: Enfoque UTE
Abbreviated Title: Enfoque UTE
ISSN (print): 1390-9363
ISSN (electronic): 1390-6542
Publisher: Universidad UTE (Quito, Ecuador)

En los últimos años, el desarrollo acelerado de la tecnología ha despertado el interés de la sociedad, facilitando su desarrollo y evolución en diferentes disciplinas a lo largo del tiempo. Esto incluye a los diferentes campos de la ciencia, ya que se han desarrollado conjuntamente y de manera exponencial. Esto último se da debido a la dificultad y monotonía que poseen ciertas actividades, requiriéndose por tanto de innovación constante en técnicas y herramientas que faciliten el desempeño de estas (Francescon, Kilby, Noll, Masi y Sata, 2017). Tal es el caso de la medicina, que, en conjunto con la tecnología evoluciona de forma sinérgica, de manera que logran aumentar la efectividad y la eficiencia de diagnósticos, tratamientos, rehabilitación y recuperación de pacientes, obteniendo así, un inmenso avance para la tecnología y, lo más importante, para la humanidad (Gilmore y Jog, 2017).
En este trabajo de investigación, el cual fue presentado brevemente en INCISCOS 2018 (Rivera, Bonilla y Moya, 2019), pretende dar a conocer el proceso de diseño y construcción del dispositivo mecatrónico mencionado inicialmente. Dicho dispositivo pretende reducir o mitigar los temblores producidos en los miembros superiores (específicamente en las manos) consecuencia de la EP, con lo que se procura obtener mejoras en la calidad de vida de las personas que la padecen, además de lograr la independencia de sus actividades cotidianas.
La Enfermedad de Parkinson (EP) o parkinsonismo, es una patología neurodegenerativa, progresiva e incurable. Actualmente su etiopatogenia sigue siendo parcialmente conocida debido al carácter multifactorial (ambientales, genéticos y de envejecimiento, etc.,) que posee (Yang, Bei-sha y Ji-feng , 2016). Principalmente esta enfermedad se caracteriza por la presencia de 4 síntomas cardinales, entre los cuales están: temblor, rigidez, bradisinecia/acinesia, e inestabilidad postural. Para su diagnóstico, es imprescindible la presencia de temblor o bradicinesia (Linazasoro Cristóbal, López del Val, López García, Martínez Martínez y Santos Lasaosa, 2012).
Según Cudeiro Mazaira (2015), esta enfermedad aparece comúnmente en la edad adulta, siendo la edad, el factor de riesgo más significativo para su presentación clínica. No obstante, la EP puede también manifestarse en individuos jóvenes (Estrada Bellman y Martínez Rodríguez, 2011). Cabe señalar que los síntomas típicos suelen empezar a manifestarse a partir de la sexta década de vida, por lo que se la relaciona con el envejecimiento.
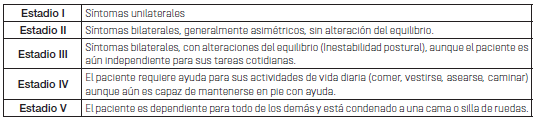
Existen varias escalas que se utilizan para medir la severidad de los síntomas en esta enfermedad, pero para este trabajo se destaca la escala de Hoehn y Yahr, presentada en la Tabla 1, la cual indica la etapa motora en que la que se encuentra el paciente (Cudeiro Mazaira, 2015).
El temblor es la alteración más común del movimiento y consiste en una oscilación rítmica involuntaria que puede afectar uno o varios segmentos del cuerpo (Shah, Goyal y Palanthandalam-Maadapusi, 2017). Se trata normalmente de una oscilación de baja frecuencia en reposo, la cual disminuye de manera transitoria cuando el paciente hace un movimiento voluntario (Jankovic y Tolosa, 2007), y suele incrementarse a causa de estrés o ansiedad. Probablemente el temblor es la disfunción motora más notable en la enfermedad de Parkinson (EP).
(Linazasoro Cristóbal, López del Val, López García, Martínez Martínez y Santos Lasaosa, 2012).
Se distinguen dos tipos de temblores en la EP, el temblor en reposo y el temblor postural o temblor de acción. La frecuencia es de 4 a 6 Hz y de 5 a 8 Hz, respectivamente (Cudeiro Mazaira, 2015). Su topografía más frecuente es en manos, brazos, cabeza, tronco, mandíbula, labios y lengua (Yang, Bei-sha y Ji-feng , 2016). En extremidades superiores, el temblor en reposo afecta a la flexión-extensión de los dedos, pronación-supinación del antebrazo y a la flexión-extensión en la articulación del codo (Jankovic y Tolosa, 2007).
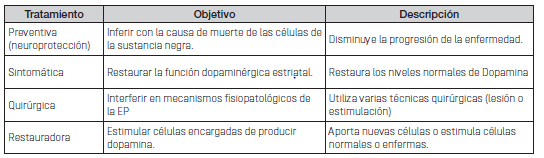
Actualmente, existen varias terapias o tratamientos para el control sintomático de la EP, desde tratamientos farmacológicos, hasta tratamientos de terapia celular. Se los puede dividir en cuatro categorías presentadas en la Tabla 2.
De los tratamientos y terapias mencionados, pocos son no invasivos y carecientes de efectos secundarios no deseables. Un ejemplo es la levodopa, ya que, por ser el fármaco más efectivo, es por lo tanto el más usado para el control sintomático de EP (López del Val & Linazasoro, 2012). A pesar de ello, después de meses o años del consumo constante de levodopa, el efecto terapéutico en los pacientes disminuye, o en ocasiones desaparece, haciendo que existan controversias en relación con cuándo debe recetársela en la etapa Inicial de la EP (Estrada Bellman y Martínez Rodríguez, 2011).
El dispositivo propuesto en este trabajo de investigación pretende ser una solución mecánica para mitigar movimientos involuntarios, en el caso de que las personas no tengan acceso o no puedan realizarse los tratamientos antes mencionados. Cabe mencionar que el dispositivo mecatrónico no debe ser visto como una cura, sino como un elemento coadyuvante en el tratamiento de esta enfermedad.
La metodología Mecatrónica (guía VDI-2206) desarrollada por “The Association of German Engineers” (Verein Deutscher Ingenieure, VDI) (VDI-RICHTLINIEN, 2004), fue considerada la adecuada para ejecutar este trabajo de investigación, la cual es una guía práctica para el desarrollo sistemático de productos mecatrónicos innovadores. Considerando que se involucra la palabra mecatrónica, esta guía metodología implica la interacción simultánea y sistémica entre varias disciplinas, cuyo manejo es el modelo en V como macrociclo, debido a que describe una secuencia lógica de pasos, facilitando el desarrollo de sistemas mecatrónicos. También se utilizó la técnica de prototipado rápido, la cual utiliza un software CAD para el diseño de un prototipo virtual, que posteriormente, se materializó con la utilización de una impresora 3D con tecnología FDM.
Para realizar los diagramas necesarios que ayuden a delimitar y conceptualizar el dispositivo se ha utilizado el lenguaje SysML, el cual es un lenguaje de especificación de sistemas estandarizado en la OMG. (Friedenthal, Moore y Steiner, 2012).
Determinación de requerimientos
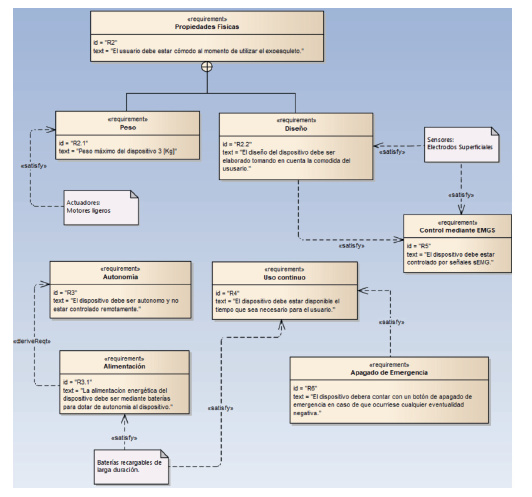
Dado que se necesitan cumplir con ciertas expectativas y ciertos requerimientos, se realizó un análisis cualitativo de los requerimientos más destacables (Figura 1).
(Rivera y Bonilla, 2018)
En el diagrama es posible establecer y definir aquellos requerimientos necesarios para conceptualizar el dispositivo, e indicar las propiedades físicas y las características funcionales del dispositivo. A partir de estos requerimientos se pueden determinar los modelos, técnicas y herramientas para el diseño del sistema. Para generar las señales de control se usarán las señales electromiográficas superficiales (sEMG) y su análisis en el dominio del tiempo y de la frecuencia. El reconocimiento de los patrones de movimiento se realizará por medio del uso de redes neuronales artificiales, debido a que permiten la calibración del dispositivo dependiendo de las características antropomórficas del paciente y del estado del sistema nervioso (Bonilla, Lukyanov , Litvin y Deplov, 2015).
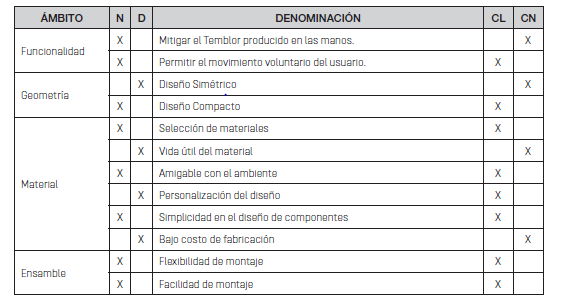
Para lograr satisfacer los requerimientos de diseño, se realizó el análisis funcional del dispositivo a través de una matriz morfológica (Tabla 3).
El principal punto fue reducir los costos de implementación, por lo tanto el hardware debe ser de facil adquisición y remplazo, y los algorítmos computacionales no deben generar demasciada carga lógica y de datos.
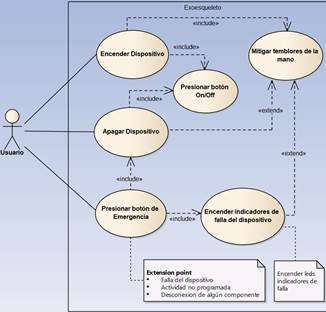
Al tomar como entrada los requerimientos mencionados anteriormente, se logró definir la funcionalidad del dispositivo a partir del uso de varios diagramas que explican su funcionamiento de una forma resumida y simple. Para ello se efectuó un diagrama de casos de uso (UC, Figura 2).
(Rivera y Bonilla, 2018)
El diagrama muestra la interacción del usuario con un dispositivo mecatrónico. El sistema de mitigación debe ser calibrado para cada paciente previo al uso del exosqueleto. Esto se logra entrenando el sistema inteligente de identificación de temblor o movimiento deseado de manera individual.
Los conceptos respecto al dispositivo se generaron mediante la utilización de una matriz morfológica del sistema, en la cual, dependiendo de la función (principal o secundaria), fueron propuestas varias opciones que cumplan con los necesidades y expectativas del sistema.
Tomando en cuenta el cumplimiento de los requerimientos y expectativas del dispositivo, utilizando una matriz morfológica, se generó y evaluó los tres conceptos para el diseño del dispositivo, los cuales fueron resultado de la selección de los elementos más apropiados para el diseño de este. Estos conceptos, en lo posible, cumplen con la intención en cuanto a funcionamiento del dispositivo.
Una vez obtenida la información de la elaboración de conceptos del dispositivo, se procedió a la valoración de conceptos, la cual ayudó a ponderarlos, y así, facilitar la selección del diseño conceptual del mismo.
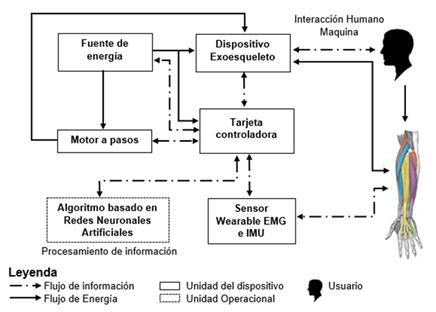
Como se puede apreciar en la Figura 3, se encuentran los elementos pertenecientes al concepto considerado el más adecuado para el diseño del dispositivo. En gran parte se debe a que la mayoría de sus componentes tienen la característica de open source, también es debido a su facilidad de control y de programación que la caracteriza, disminuyendo así, el tiempo requerido para finalizar la etapa de control del dispositivo.
En el diagrama de bloques presentado en la Figura 3, se presenta la estructura básica del sistema, la misma que muestra el flujo de información y de energía del dispositivo mecatrónico.
(Rivera yBonilla, 2018)
Para el diseño mecánico del dispositivo, se analizó la biomecánica del brazo, y específicamente del movimiento de pronosupinación del antebrazo. Esto último con el objetivo de que el diseño del exoesqueleto permita al usuario mover su extremidad superior de la forma más anatómica posible (Rocon et al., 2008).
Como se mencionó en un inicio, existen algunos movimientos anatómicos afectados por la EP, de los cuales se trabajará únicamente con el movimiento de pronosupinación del antebrazo. Esto último debido a que se decidió primero validar únicamente el algoritmo del sistema en uno de los movimientos. Por lo tanto, el exoesqueleto únicamente poseerá dos grados de libertad: Pronación-supinación del antebrazo (motor a pasos) y extensión-flexión de la articulación del codo (sin actuador). En el dispositivo se incluyó la extensión-flexión del codo como una junta tipo revoluta sin actuador, esto debido a que, por el peso del motor, el dispositivo necesita de sujeción extra para que no se desplace hacia la mano por acción de la gravead.
Mecanismo de pronosupinación del antebrazo
Para el diseño del mecanismo se tomó en cuenta el análisis del movimiento de pronosupinación mencionado anteriormente. Este mecanismo requiere que la mano gire aproximadamente 180º con respecto al eje horizontal, por lo que para cumplir con este requerimiento se necesitó de un mecanismo que realice el mismo recorrido y posea una amplitud igual o cercana a la mencionada.
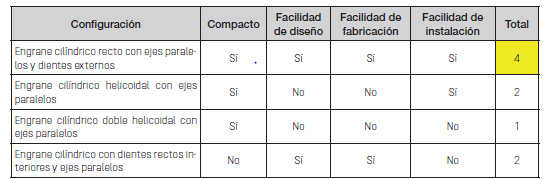
Para la selección de la configuración del sistema de engranes se realizó una comparación entre las ventajas y desventajas que cada una de estas posee. Los resultados de dicho análisis se muestran en la Tabla 4.
Para la implementación del dispositivo se consideró un sistema de engranes de ejes paralelos y dientes externos. Esto último debido a que satisface lo mencionado anteriormente.
Para el posicionamiento del mecanismo se analizaron dos posiciones a lo largo del antebrazo: la parte proximal y la parte distal. En relación con la sujeción del exoesqueleto hacia el paciente, Rocon, Belda y Sánchez (2014) demostraron experimentalmente que, en relación con el confort, cualquier punto en el antebrazo puede soportar la misma presión sin producir incomodidad, por lo que el dispositivo se puede posicionar sobre cualquier punto del antebrazo. Una vez seleccionada la configuración de engranajes presentada en la Tabla 4, se procedió al diseño y modelado de cada una de las piezas que conforman el exoesqueleto. Cabe señalar que el mecanismo del dispositivo se ubicará en la parte distal del antebrazo, cerca de la muñeca, y este estará conformado por dos engranes rectos que permitirán la pronosupinación de la mano.
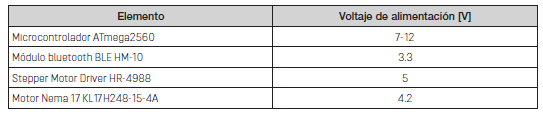
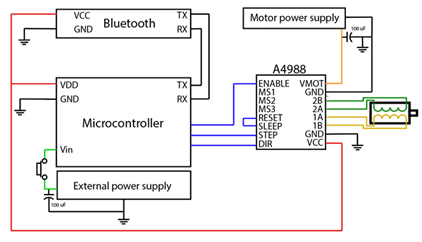
En el diseño del circuito eléctrico fue necesario considerar la conexión entre varios elementos, los cuales se pueden apreciar en la Tabla 5.
Debido a que la tarjeta que contiene el microcontrolador, una vez energizada, entrega una fuente de 5[V] y 3.3[V], se requiere una fuente capaz de alimentar la tarjeta controladora y una fuente de alimentación para el motor. En la Figura 4 se puede apreciar el esquema del circuito desarrollado con la integración de todos sus elementos. El esquema del circuito se realizó en el programa de simulación Proteus.
El microcontrolador se encarga de: la adquisición y procesamiento de las señales sEMG, clasificación del movimiento y el temblor; y accionamiento del actuador que mitiga el temblor.
Para lograr controlar el dispositivo, se realizó un trabajo de campo en el Hospital de especialidades Eugenio Espejo, en el cual se obtuvo información de trece pacientes diagnosticados con EP los cuales están bajo el cargo del Dr. Fernando Alarcón, neurólogo especialista en trastornos de movimiento. La adquisición de la base de datos se realizó mediante la utilización del dispositivo wearable MYO Armband, el cual se conectó mediante bluetooth a una computadora portátil. Para la visualización y almacenamiento de datos, se realizó la integración de tres programas diferentes: el software matemático Matlab, la aplicación MyoConnect y Microsoft Excel.
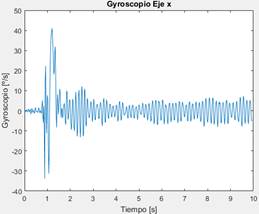
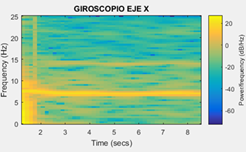
Puede mencionarse que la vinculación Matlab-Myo se realizó mediante la utilización del Myo SDK para Matlab, cuya adaptación está dada por Mark Tomaszewski (Tomaszewski, 2015) del paquete SDK proporcionado por los desarrolladores del dispositivo MYO Armband. En la Figura 5, se puede apreciar la señal producida en el giroscopio al momento de realizar una de las actividades generadoras de movimientos involuntarios.
Para la adquisición de datos que se realizó, se usó una frecuencia de muestreo de 200[Hz] para el almacenamiento de datos de los electrodos, y una frecuencia de muestreo de 50[Hz] para el sistema de medición inercial (IMU). La base de datos obtenida consta de porcentaje de activación de los músculos del antebrazo, así como también su posición y orientación absoluta (Bonilla, Mosquera, Mideros y Litvin, 2017).
Se realizaron siete tareas para la estimulación del temblor parkinsoniano, las mismas que sirvieron para adquirir sus características más importantes. Cabe recalcar que las personas realizaron las tareas mientras se encontraban sentados. Cada una de estas se realizaron a tres diferentes velocidades: Velocidad lenta, moderada y rápida. A continuación. Las actividades realizadas fueron: (a) Persona en reposo, (b) Persona apuntando hacia un objeto, (c) Brazos Extendidos, mano en pronación, (d) Brazos Extendidos, mano en supinación (e) Mover una taza de izquierda a derecha/derecha a izquierda, y, (f) Mover los dedos alternadamente.
Análisis de datos en el dominio de la frecuencia
Este análisis se realizó con el objeto de identificar la frecuencia responsable del temblor parkinsoniano (temblor en reposo). Con los datos obtenidos, se realizó un análisis espectral con el objetivo de extraer información relevante de las señales. Para realizar dicho análisis, se utilizó la transformada rápida de Fourier. Comúnmente se realiza la transformada rápida de Fourier para, eventualmente, calcular el espectro de potencia (PS), así como también, la densidad espectral de potencia (PSD) (Montoya, Muñoz y Henao, 2015).
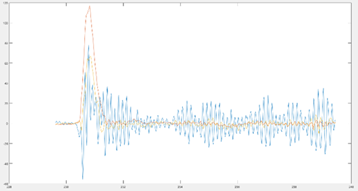
El objetivo de aplicar esta transformada es realizar el cambio del dominio del tiempo hacia el dominio de la frecuencia. Como resultado de la aplicación de la FFT, mediante el software matemático Matlab, se obtuvieron gráficas que ayudaron a identificación de la frecuencia del temblor producido durante la ejecución de cada actividad. En la Figura 6 se puede observar el cambio de dominio que sufre una señal cuando se le aplica la FFT.
Nota: Actividad realizada: Persona en reposo.
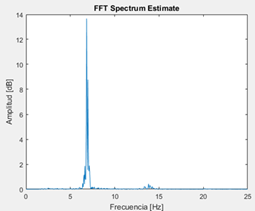
Mediante la utilización de la transformada de Fourier de tiempo corto (STFT, Figura 7), se realizó el cálculo del espectrograma. Esto último se realizó con el objetivo de visualizar e identificar la frecuencia responsable del temblor, la cual, según la literatura, se encuentra entre los 4 y 6 [Hz] (Cudeiro Mazaira, 2015) .
El cálculo de la PSD se lo realizó con el fin de extraer las características de la señal en el dominio del tiempo. Existen algunos variables estadísticas que son aplicables a la densidad espectral de potencia de una señal EMG, siendo las más utilizadas la media y la mediana (Phinyomark, Sirinee , Huosheng, Pornchai y Limsakul, 2012). Estas variables estadísticas toman el nombre de frecuencia media (MNF) y frecuencia mediana (MDF), respectivamente.
Nota:Actividad: Persona en reposo.
El algoritmo de control del dispositivo robótico se realizó por medio de la utilización de inteligencia artificial. Dicho algoritmo se basó en redes neuronales artificiales (RNA) multicapa, las cuales se usaron con el objetivo de buscar y clasificar patrones similares en las señales electromiográficas obtenidas de los pacientes con EP. (Bonilla, Moya, Evgeny, Lukyanov y Marín, 2018)
De las diferentes topologías de RNA existentes, se seleccionó la RNA Backpropagation (redes neuronales con retro propagación de error). La selección se debió a la capacidad de optimización que esta red posee, ya que permite, al definir el gradiente del error, minimizarlo con respecto a los parámetros de dicha red (Ponce Cruz, 2010).
La estrategia buscó controlar el motor a pasos de la siguiente manera: mediante el entrenamiento de una red neuronal para varias actividades, realizar una compensación de los pesos de la red, y con esto, obtener salidas que reconozcan el temblor en las señales EMG, controlando así la ortesis activa.
Se utilizó la herramienta nntool que posee Matlab para realizar el entrenamiento de redes neuronales artificiales. Para dicho entrenamiento se seleccionaron funciones sigmoidales a la entrada y a la salida de la red, esto debido a que su derivada siempre es positiva y cercana a cero para valores altos positivos o negativos, lo cual permite utilizar reglas de aprendizaje definidas para funciones tipo escalón, con la ventaja de que la derivada de la función sigmoide estará definida en todo el intervalo (Ponce Cruz, 2010).
Cada paciente requirió de un entrenamiento individual, para cada una de las actividades que se efectuaron. Entonces, mediante la herramienta Simulink de Matlab, utilizándose como vectores de entrada tres neuronas para cada uno de los electrodos, se procedió a entrenar una red neuronal para cada paciente. Estas tres entradas constan de los valores del cálculo de las variables estadísticas MNF, MDF y la varianza (Bonilla, Mosquera, Mideros y Litvin, 2017)
Para obtener la mejor respuesta, se realizó varios entrenamientos con la modificación del número de neuronas en la capa oculta. Se consideraron múltiplos de cinco, por lo que, se entrenó la red con: 5, 10, 15, 20, 25, 30 y 35 neuronas en la capa oculta. Cabe señalar que el número máximo y mínimo fueron seleccionados tomando en cuenta a la respuesta entregada por la red, y, a que la capa oculta posea un 30 % más neuronas que la entrada de la red (Bonilla, Lukyanov , Litvin y Deplov, 2015).
Los principales procesos en el diseño del software son: Pretratamiento de las señales; filtrado; segmentación, análisis estadístico y espectral; y la implementación de las redes neuronales para cada uno de los pacientes (usuarios del sistema). Un esquema de diseño de software de control se propuso en el trabajo (Bonilla, Litvin, Lukyanov, y Starodubtseva, 2018). Una vez establecida la arquitectura de las redes neuronales se realiza el entrenamiento para cada usuario, y también el ajuste del exosqueleto según las características antropomórficas de las extremidades superiores.
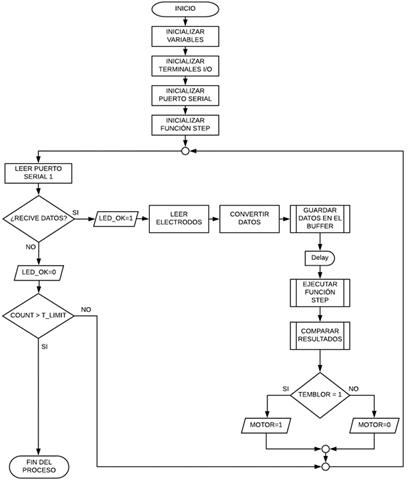
En la Figura 8 se puede observar el diseño del software plasmado en un diagrama de flujo. La función step fue generada por Simulink CodeGeneratión. Con esta herramienta se logró la generación del código c para lograr ejecutar la programación realizada en bloques de Simulink en la tarjeta controladora. El programa realizado en Simulink (función step) está encargado de la extracción de características de las señales sEMG, de la ejecución de la red neuronal y clasificación de patrones.
Nota: Programa para el sistema embebido.
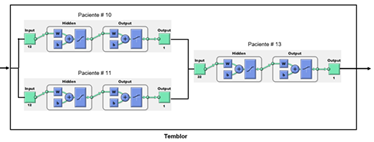
La estructura de la red neuronal en el bloque de clasificación del temblor se puede observar en la Figura 9. Esta red neuronal se entrenó con dos pacientes, los más representativos, dicho de otra manera, en los cuales el temblor estaba mucho más presente comparado con otros. Esto último se debió a que estos pacientes no tenían un suministro de levodopa constante, lo que hace que los síntomas de la EP se presenten en su totalidad.
Nota: Red neuronal que detecta el temblor
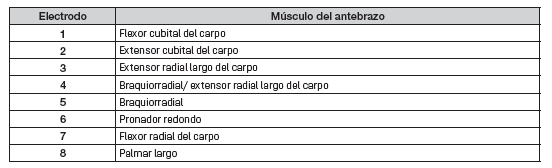
El software diseñado en este apartado contiene dos redes neuronales las cuales fueron entrenadas únicamente con cuatro electrodos. Estos electrodos fueron elegidos por su ubicación (Tabla 6), ya que, al estar próximos o cercanos a los músculos responsables de la pronación y la supinación, se obtuvieron mejores resultados en la clasificación de los patrones.
(Rivera y Bonilla, 2018)
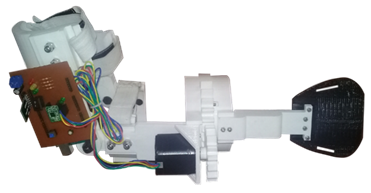
Para llevar a cabo la integración de todos los elementos diseñados con anterioridad, se tuvieron que tener en consideraciones los requerimientos planteados en un inicio, para lograr cumplir con las expectativas que se esperan del dispositivo. En la Figura 10 se puede observar el resultado del diseño del sistema. Ubicamos primordial establecer la conexión Bluetooth entre el dispositivo Myo Armband y la tarjeta controladora, se utilizó la librería de alto nivel MyoBridge (Roland, 2015), la cual incluye un firmware para el módulo Bluetooth BLE HM-11 y HM-10.
El dispositivo se diseñó para que se colocara alrededor del bíceps y fuese ajustable. Además, para su diseño, se seleccionaron las medidas antropométricas de mayor tamaño para que los usuarios que estén por debajo de estas se la puedan ajustar y colocar mediante una sujeción con bandas elásticas, dotadas de un sistema de cierres de gancho-bucle o más conocido como cierres por contacto (Velcro).
La validación del diseño se realizó por medio de la utilización de la base de datos adquirida en un inicio, la cual está conformada por información procedente de los pacientes con EP. Los datos extraídos de cada una de las actividades realizadas por los pacientes se utilizaron como entrada del software del sistema exoesqueleto.
Se debe señalar que los datos de los pacientes con los que fue entrenada la red no fueron tomados en cuenta, los mismos que pertenecen al paciente 9, 12 y 13. Por otro lado, ya que se utilizaron únicamente cuatro electrodos, como se mencionó anteriormente, como entrada para el entrenamiento de la red neuronal, de la información proporcionada por el dispositivo Myo Armband, se utilizaron solo cuatro electrodos correspondientes a los electrodos tres, cuatro, seis y siete.
La validación de los datos obtenidos se realizó ingresando las mediciones de los electrodos de los diez pacientes en red neuronal perteneciente al software diseñado. Como resultado se obtuvo la información presentada en la Tabla 7,Tabla 8yTabla 9.
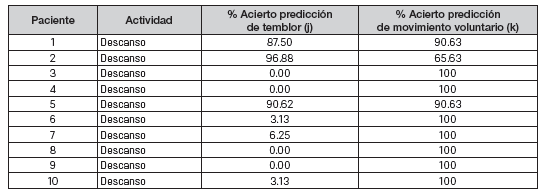
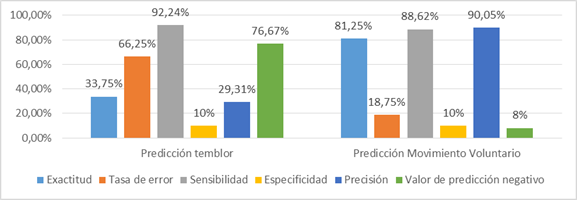
Por último, para cuantificación del desempeño del algoritmo se realizaron varias matrices de confusión, una por cada actividad y cada salida de la red neuronal. El objetivo de este tipo de tabla es poder visualizar si el algoritmo está confundiendo las clases de clasificación. En la Figura 11 se puede observar el diagrama de barras de los porcentajes extraídos de las matrices de confusión de la actividad 1.
Nota: Actividad 1: Reposo
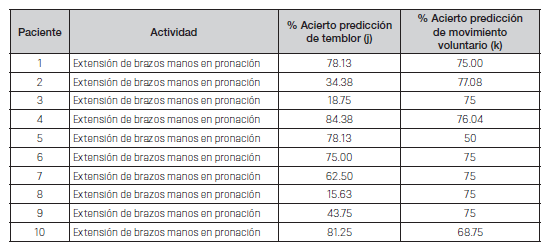
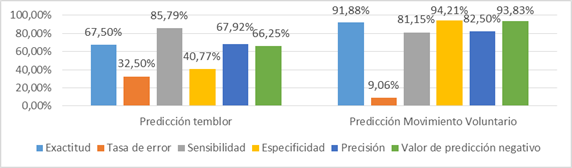
En la Figura 12 se puede observar el diagrama de barras de los porcentajes extraídos de las matrices de confusión de la actividad 3.
Nota:Actividad 3: Brazos extendidos en Pronación
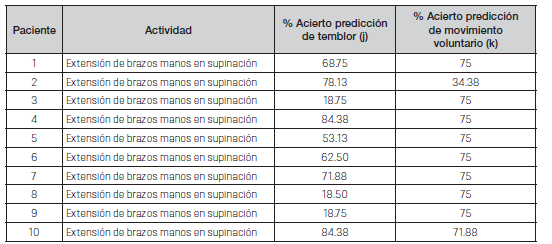
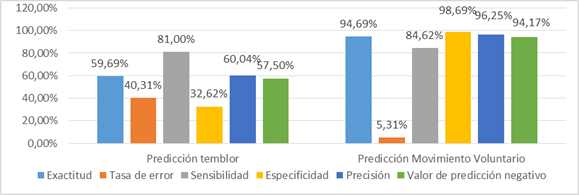
En la Figura 13 se puede observar el diagrama de barras de los porcentajes extraídos de las matrices de confusión de la actividad 4.
Nota:Actividad 4: Brazos extendidos en supinación
Como resultado del análisis global de respuesta del algoritmo podemos observar que la predicción del temblor es mucho menos precisa y exacta que la predicción del movimiento voluntario. Esto quiere decir que posiblemente el entrenamiento de la red deba hacerse con datos que fluctúen entre movimiento voluntario y temblor para así lograr tener una mejor predicción.
Por otra parte, para tener una mejor predicción con un algoritmo basado en redes neuronales artificiales, debe de existir un entrenamiento específico con los datos de la persona la cual va a utilizar el dispositivo. Esto último debido a que la frecuencia del temblor varia de paciente a paciente y, debido a esto, no se puede generalizar un único algoritmo para todas las personas que padecen EP.
El sistema de adquisición de señales electromiográficas superficiales Myo Armband presento ventajas convenientes respecto a otras opciones ya que permite realizar la integración con el dispositivo exoesqueleto de forma inalámbrica mediante conexión bluetooth, además de su facilidad de utilización para la adquisición clara de señales SEMG.
La aplicación de sistemas embebidos basados en inteligencia artificial y sensores inalámbricos de alto nivel permite el desarrollo de dispositivos que puedan adquirir, procesar y clasificar información que sin su gestión serian imperceptibles parar el ser humanos en tiempo real. Para este trabajo el tiempo de respuesta del sistema no supera los 400 [ms], la mayor carga se observa en el análisis estadístico y espectral de las señales sEMG.
Las redes neuronales artificiales tipo Back Propagation logró identificar y clasificar patrones en las señales electromiográficas gracias a su capacidad para retroalimentarse y deja claro que es la más conveniente a usar en estudios de este tipo. El error medio cuadrado, durante la etapa de entrenamiento, no superó el 5 %.
Se debe considerar que, en determinadas ocasiones, la frecuencia del movimiento tembloroso de la EP fluctúa y no se mantiene constante, además de ser de diferente magnitud para cada persona que padece EP.
La frecuencia del movimiento tembloroso se reduce de forma considerable en pacientes que mantienen un uso constante del fármaco Levadopa, reduciendo la amplitud del mismo y siendo casi imperceptible en el espectrograma.
El dispositivo exoesqueleto construido puede ser de gran ayuda para pacientes con EP de escasos recursos económicos, ya que el uso del mencionado fármaco requiere de elevados recursos económicos y solo el suministro continuo de la medicina ayuda al control sintomático de la enfermedad.
Como resultado de predicción al clasificar el temblor, se obtuvo desde un 0.0 % hasta un 96.88 % de acierto en la clasificación. De la misma forma, al clasificar el movimiento voluntario, se obtuvo desde un 34.38 % hasta un 100 % de acierto.
Bonilla, V., Lukyanov, E. A., Litvin, A. V., & Deplov, D. A. (2015). Identification of the elbow motion kinematic parameters by means of artificial neural networks technology. Vestnik of Don State Technical University, 15(1), 39-47., https://vestnik.donstu.ru/jour/article/view/228.
Francescon, P., Kilby, W., Noll, J., Masi, L., & Sata, N. (2017). Monte Carlo simulated corrections for beam commissioning measurements with circular and MLC shaped fields on the CyberKnife M6 System: a study including diode, microchamber, point scintillator, and synthetic microdiamond detectors (Vol. 62). Physics in Medicine & Biology.: .
Phinyomark, A., Sirinee, T., Huosheng, H., Pornchai, P., & Limsakul, C. (2012). The Usefulness of Mean and Median Frequencies in Electromyography Analysis. G. R. Naik (ed.). https://dx.doi.org/10.5772/50639.
Rivera, G., Bonilla, V., Moya, M., 2019, Exoskeleton prototype to mitigate pronosupination tremors in people with Parkinson's disease, 2018, International Conference on Information Systems and Computer Science (INCISCOS),, 16, 22, https://doi.ieeecomputersociety.org/10.1109/INCISCOS.2018.00010.
Rocon E, G. J.-L. (2012). Biomechanical Loading as an Alternative Treatment for Tremor: A Review of Two Approaches. Tremor and Other Hyperkinet Movements., https://tremorjournal.org/article/view/77.
Roland, V. (2015). MyoBridge. https://github.com/vroland/MyoBridge/wiki.
Thalmic-Labs. (2017). Obtenido de MYO. https://www.myo.com/.
Tomaszewski, M. (2015). Obtenido de GitHub. https://www.mathworks.com/matlabcentral/fileexchange/55817-myo-sdk-matlab-mex-wrapper.
Yang, Y., Bei-sha, T., & Ji-feng, G. (2016). Parkinson’s Disease and Cognitive Impairment. Hindawi Publishing Corporation. pp. 1-8., https://dx.doi.org/10.1155/2016/6734678.