Journal Information
Title: Enfoque UTE
Abbreviated Title: Enfoque UTE
ISSN (electronic): 1390-6542
Publisher: Universidad UTE (Quito, Ecuador)

La planificación estratégica es un elemento esencial en el aprovechamiento sostenible de los recursos en diversas actividades del desarrollo. Esa planificación demanda la implementación óptima de nuevas tecnologías en la captura, procesamiento y generación de datos geoespaciales de alta calidad y precisión, orientados a la automatización de procesos para el incremento de la eficiencia basada en el conocimiento (Whelan et al., 2020).
La documentación cuantitativa precisa del territorio es un desafío que actualmente afronta la teledetección, según Nesbit et al. (2022) técnicas como LIDAR y fotogrametría, se utilizan comúnmente para registrar información tridimensional (3D) detallada de terrenos inaccesibles, para aplicaciones académicas, productivas, comerciales y de seguridad pública. Estas tecnologías permiten registrar información 3D confiable sobre una escena, mientras se preservan las propiedades geométricas.
Actualmente, la teledetección cercana con UAV, instrumentada con equipos de navegación autónomos y características técnicas particulares, es ampliamente usada para generar información de diversa índole, incluidas las dimensiones planimétricas y altimétricas precisas de un determinado territorio. Los UAV posibilitan capturar imágenes que comúnmente se procesan con flujos de trabajo bajo estructura desde movimiento y multivista estéreo (SFM-MVS), lo cual representa alternativas precisas para el procesamiento fotogramétrico de grandes volúmenes de datos (James y Robson, 2012; Westoby et al., 2012).
Para garantizar la precisión de datos en vuelos fotogramétricos se debe contar con puntos de control terrestre (GCP) para obtener precisiones confiables en el posicionamiento absoluto y calibración de los parámetros de orientación interna de la cámara. Para mejorar las capacidades de posicionamiento preciso de los GPS convencionales en los UAV, las capacidades GNSS, de fase multiportadora conocida como Cinemática en Tiempo Real (RTK), son altamente recomendadas (Štroner, et al., 2020).
Recientemente se han implementado diversas tecnologías de fotogrametría para generar escenas 3D a partir de imágenes 2D, al respecto Liu et al. (2020) y Wrigth et al. (2020) usaron algoritmos de forma de textura (SFT), mientras que la forma de sombreado (SFS) es reportada por Wu et al. (2018) y las estructura desde movimiento y multivista estéreo (SFM-MVS) es analizada en Meinen (2020). Los resultados de estos tres modelos han demostrado mucha eficiencia para obtener nubes de puntos tridimensionales de superficies de objetos a muy bajo costo.
Algunos ejemplos de conjuntos de datos digitales con resolución precisa y detallada de áreas extensas con difícil acceso se presentan en Gómez-Gutiérrez y Gonçalves (2020), con aplicaciones en estudios topográficos y geomorfológicos, Nesbit et al. (2021) para trabajos geológicos y Martínez-Carricondo et al. (2020) en temas geotécnicos.
Por su parte, Mello et al. (2022) verificaron la precisión y el rango de aplicación de la fotogrametría UAV para mediciones geométricas y volumétricas, en comparación con los procedimientos convencionales, usando una estación total. Los vuelos de UAV se realizaron mensualmente, durante un año, encontrando diferencias entre el 9 % y 4 % respecto de los datos convencionales, constituyendo una alternativa viable con precisión comprobada.
Respecto a la precisión de los datos de UAV para generar modelos digitales del terreno (MDT), Lopes et al. (2022) reportaron un solapamiento de 70x50 % como suficiente para obtener precisiones sin diferencias significativas en un MDT con vuelo fotogramétrico de UAV en relación con datos RTK.
Con base en estos antecedentes, se planteó como objetivo de esta investigación generar información topográfica de forma rápida, precisa y de bajo costo, en un área de configuración irregular con una superficie aproximada de 60 ha, para generar información topográfica secundaria, aplicada en diversos campos productivos y de desarrollo, como, por ejemplo, variables hidrológicas, entre las que destacan la dirección y acumulación de flujo necesarias para el cálculo del factor de longitud y pendiente (LS), en la Ecuación Universal de Perdida de Suelo Revisada (RUSLE), según lo indicado por Gürtekin y Gökçe (2021).
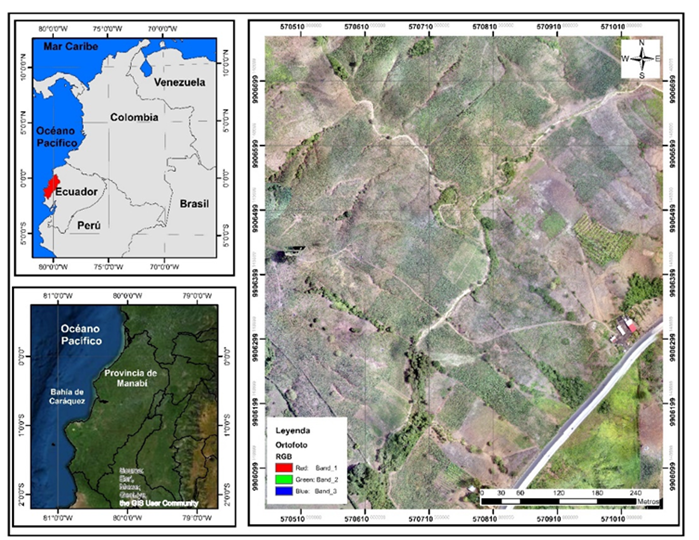
La investigación se desarrolló en la Costa ecuatoriana, provincia de Manabí, cantones Rocafuerte y Santa Ana, sobre un área de topografía irregular dedicada a la producción del cultivo de maíz, con una cobertura espacial superior a 100 ha, y algodón 0.57 ha (figura 1).
Obtención de imágenes fotogramétricas
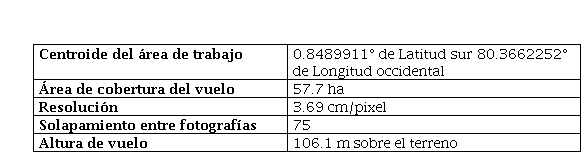
El vuelo fotogramétrico se planificó con el software Emotion AG, en el cual se definieron los siguientes parámetros: área de trabajo, altura de vuelo, resolución del pixel, solapamiento de las imágenes, así como el punto de despegue y aterrizaje del UAV (tabla 1). La fecha de vuelo correspondió al 3 de marzo de 2022, coincidiendo con la etapa V4 del desarrollo fenológico del cultivo. El vuelo se ejecutó con el UAV EBEE SQ, instrumentado con la cámara multiespectral Parrot Sequoia, la cual captura imágenes en el rango del espectro visible (RGB) y las bandas multiespectrales verde (green), roja (red), borde rojo (reg edge) e infrarrojo cercano (NIR) del espectro electromagnético (SenseFly a Parrot Company, 2018; Parrot Drone SAS, 2019). En este caso para la obtención de los productos topográficos solo se procesaron las imágenes RGB.
Para garantizar el posicionamiento preciso de las imágenes se colocó un conjunto de 6 marcadores terrestres, distribuidos equitativamente en el área de vuelo, garantizando su visibilidad en las fotografías del UAV. La georreferenciación precisa de los marcadores se realizó con la estación total, GeoMax Serie Zipp10, obteniendo las coordenadas UTM en el Datum WGS-1984, Zona 17 Sur. Estas coordenadas se utilizaron como Puntos de Control de Tierra (GCP, por su sigla en inglés) durante las alineaciones de bloques de imágenes para georreferenciar los productos topográficos en un marco de coordenadas geodésicas. El vuelo se ejecutó bajo supervisión constante de la señal del módem, verificando que las condiciones atmosféricas sean apropiadas y los parámetros de calibración de la cámara funcionen correctamente, para garantizar la ubicación precisa y visibilidad óptima de los puntos de control en las fotografías correspondientes. Con estos puntos de control, se ejecutó el flujo de trabajo en el software PIX4D. Este programa, automáticamente, genera la precisión del proyecto fotogramétrico, comparando la ubicación de los puntos de control en cada fotografía del vuelo que los contenga con su posición real precisa, obtenida en este caso con estación total. Estos mecanismos de control generaron un vuelo seguro de alta precisión, garantizando así el rendimiento y calidad de los datos.
Procesamiento de las imágenes
Las imágenes RGB obtenidas con el UAV fueron procesadas en el software de fotogrametría Pix4Dmapper, en un computador de escritorio, con procesador Intel(R) Core (TM) i9-9900K CPU 3.60GHz y 32.0 GB de RAM. El procesamiento consistió en la importación de las fotografías y las coordenadas de los puntos de control, con los ajustes necesarios en cada paso del procesamiento para logar un control total de la calidad de los datos. Como producto de este procesamiento se obtuvo: Ortomosaico, Modelo Digital de Superficie (MDS), Modelo digital del Terreno (MDT) y la nube de puntos 3D (Pix4D SA., 2019).
Obtención de productos topográficos secundarios
Usando las herramientas Surface e Hydrology del Spatial Analyst Tool en el ArcToolBox del software ArcGIS se generaron las capas de orientación e inclinación de la pendiente del terreno, dirección y acumulación de flujo, a partir del MDT. Estas capas sirven de base para la obtención de otras variables topográficas e hidrológicas, a través de operaciones de álgebra de mapas. En este caso particular se categorizó el terreno en áreas mecanizables y no mecanizables en función de la inclinación de la pendiente, clasificando el mapa en zonas memores y mayores al 12 %, respectivamente, de acuerdo con el criterio Cevallos y Shkiliova (2018).
Procesamiento de la nube de puntos 3D
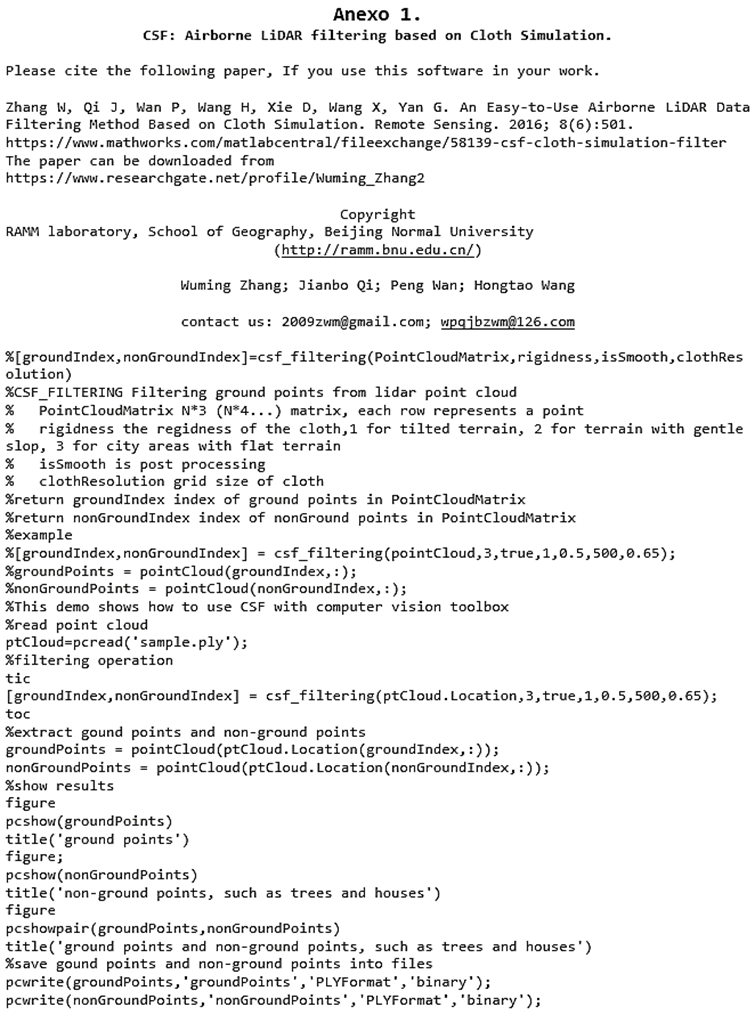
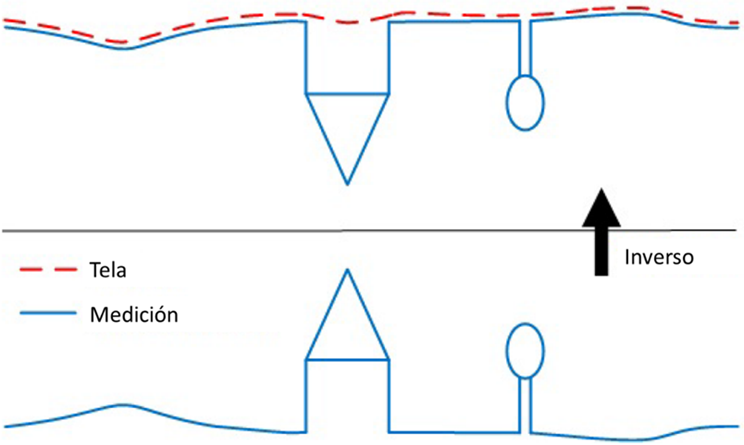
La nube de puntos contiene la posición 3D de cientos de miles de puntos generados a partir del procesamiento de las fotografías aéreas capturadas en el vuelo, en este caso s se trabajó con un cultivo de algodón en el cantón santa Ana de Manabí. Para la gestión de los datos se utilizó el software de código abierto CloudCompare, el cual permitió importar y visualizar la nube de puntos para realizar diferentes operaciones con la información contenida en dicha nube. Se clasificó la nube de puntos en datos de suelo y vegetación, usando el algoritmo Cloth Simulation Filter (CSF), con los parámetros desarrollados por Zhang et al. (2016), anexo 1. Este método se basa en la simulación de un proceso físico simple, se emula un trozo de tela suave sobre un terreno, y esta cae debido a la gravedad, adhiriéndose sobre la superficie y adoptando la forma del terreno que representa el DSM (modelo de superficie digital). Sin embargo, si primero se invierte el terreno y la tela se define con rigidez, entonces la forma final de la tela es el DTM, figura 2.
Se adoptó la metodología de Lu et al. (2021) para mejorar la clasificación de la nube de puntos, filtrando las coberturas de suelo y vegetación por los percentiles 0.1 y 0.9, respectivamente y así evitar la influencia de condiciones puntuales y con ello obtener modelos de altura de la canopia sobre un cultivo de algodón de pequeña extensión (0.5 ha).
La altura de la canopia estimada por el modelo se correlacionó con datos medidos en campo. Para la medición en campo se georreferenciaron, con estación total, 50 plantas de manera aleatoria en el cultivo y durante el mismo día del vuelo fotogramétrico, se midió su altura geométricamente con métodos topográficos de precisión milimétrica.
Resultados del vuelo fotogramétrico
Se ejecutó exitosamente el vuelo planificado, sobre 57.7 ha de terreno, capturando un total de 633 fotografías en formato RGB, en un tiempo de vuelo de 36:27 minutos y una distancia recorrida de 34 816 km.
El procesamiento fotogramétrico completo de las fotografías RGB en el software PIX4Dmapper generó un vuelo corregido geométricamente, con una precisión de 2 mm, en un marco de referencia geodésico con el datum UTM WGS-1984, Zona 17 Sur, a una resolución espacial de 3.69 cm/pixel. Con este procesamiento se obtuvo el Ortomosaico, Modelo Digital del Terreno y nube de puntos en un tiempo de 48 minutos.
Ortomosaico georreferenciado
En la figura 1, a la derecha se observa el ortomosaico, donde se evidencia claramente te el uso y cobertura del suelo, lo cual se puede digitalizar manualmente y obtener la delimitación y medición de parcelas de las distintas coberturas; por ejemplo, se identifican viviendas, vialidad, cultivos, entre otros elementos, que pueden servir de base para actualización del catastro rural, entre otros. También es posible realizar, con el ortomosaico, un procesamiento digital de clasificación, con diferentes métodos, para generar un mapa automatizado donde se discrimine las malezas de los cultivos, tal como reportan Malamiri et al. (2021).
Modelo Digital del Terreno (MDT)
El MDT, presentado en la figura 3, refleja las estadísticas sobre la topografía del terreno, con elevaciones que oscilan entre los 86.14 y 152 693 ms. n. m., con un promedio para el área de estudio de 116.52 ms. n. m. Este producto puede ser usado para realizar estudios topográficos e hidrológicos tal como reporta Pacheco (2012), donde produjo información como dirección y acumulación de flujo, orientación e inclinación de la pendiente del terreno. También es posible obtener variables hidrológicas como Índice Topográfico de Humedad, Índice de la Potencia del Flujo Superficial y el Índice de la Capacidad de Transporte de Sedimentos. Datos topográficos generados con UAV fueron reportados por Parizi et al. (2022), que combinados con el modelo HEC-RAS 2D, simuló fenómenos de inundaciones con una precisión del 92 %, superior a la obtenida con otras fuentes de datos globales.
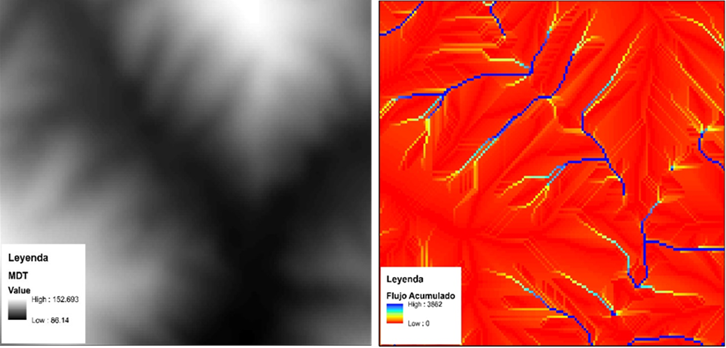
Todos estos productos topográficos son de mucho interés en estudios de amenazas por inundaciones y movientes en masa, lo cual muestra la utilidad práctica de los UAV en actividades relacionadas con la gestión de riesgos y el mejoramiento de la calidad de vida de la sociedad, tal como reportan Dai et al. (2022) y Huang et al. (2022). Por ejemplo, los máximos valores de flujo acumulado indican la presencia de cauces y líneas de drenaje, tal como se muestra en los colores azules en la parte derecha de la figura 2.
Mapa de pendientes
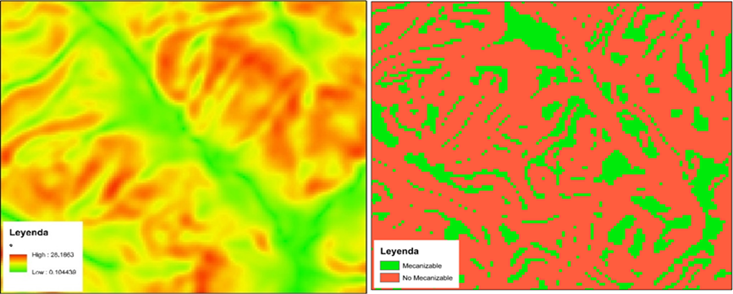
La pendiente del terreno, representada en la figura 4, resultó en valores que oscilan entre los 0.1 y los 28.18° de inclinación, con un promedio de 12.08°. La reclasificación del mapa de pendientes en clases mayores y menores a 12 %, según Cevallos y Shkiliova (2018), sirvió para identificar el área mecanizable en el sector estudiado.
Los resultados muestran que solo 10.8 ha (18 %) pueden ser mecanizadas con los criterios de seguridad establecidos, mientras que las restantes 46.9 ha no presentan condiciones óptimas para mecanización.
Resultados similares con mapas de pendiente provenientes de UAV fueron analizados en Zolkepli (2021), quienes encontraron alta calidad en las imágenes de las ortofotos y el Modelo Digital de Superficie (MDS).
Nube de puntos 3D
Como uno de sus resultados del procesamiento se generó el fichero con una densa nube de puntos que contiene la posición 3D de 267 558 455 puntos generados a partir de las fotografías aéreas capturadas en el vuelo, con un tiempo de procesamiento de 10 horas y 16 minutos, en un computador de escritorio, con procesador Intel(R) Core (TM) i9-9900K CPU 3.60GHz y 32.0 GB de RAM, generando un archivo en formato Laz de 2.73 GB.
La figura 5 muestra una subescena con el ortomosaico a la izquierda y la nube de puntos a la derecha, el rectángulo rojo al centro de la nube de puntos señala la ubicación de un cultivo experimental de algodón, donde se puede evidenciar la buena calidad en la representación y distribución de los datos para el área de estudio.

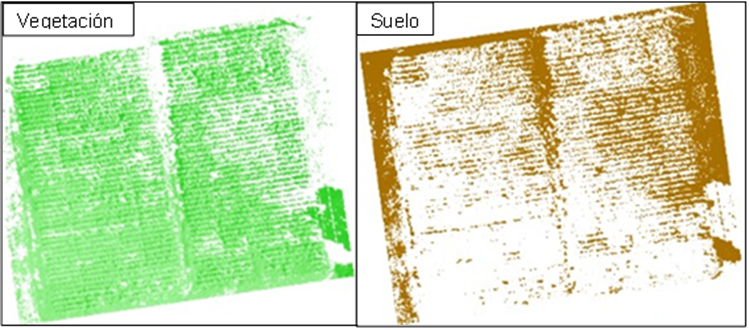
Al aplicar el algoritmo CSF, sobre el segmento de la nube de puntos correspondiente al cultivo experimental, se generaron dos nuevas capas, con los valores de altura para cada punto, una corresponde a la cobertura del cultivo de algodón con 45781 puntos, y la otra representa el suelo con 16646 registros (figura 6).
Considerando que en Latinoamérica y específicamente en Ecuador, existen muy pocas o no existen experiencias relacionadas con la utilización de la nube de puntos 3D, como producto de un vuelo fotogramétrico, se recomienda esta tecnología usando el software CloudCompare. Este es un programa de código abierto para edición y procesamiento de nubes de puntos 3D y malla triangular, el cual incorporó los parámetros del algoritmo Cloth Simulation Filter (CSF) y otras herramientas para completar los cálculos necesarios y obtener resultados precisos (CloudCompare, 2021).
Mesas-Carrascosa et al. (2020), calcularon la altura de la planta en viñedos de España, usando algoritmos que combinan índices RGB con la nube de puntos de un vuelo con UAV, logrando precisiones superiores al 90 %, respecto a datos medidos en campo con métodos tradicionales.
También, Lu et al. (2021) estimaron la altura de la planta del cultivo de maíz, usando el método de la nube de puntos, con imágenes de un vuelo fotogramétrico con UAV, comparando la altura estimada con datos medidos en campo, resultando un R2 = 0.78, lo cual ratifica la factibilidad de aplicación de este tipo de tecnologías en la estimación óptima de variables fenotípicas de cultivos, de acuerdo con la validación que hicieron los autores con datos de campo, medidos geométricamente.
Por otra parte, al usar el algoritmo CSF Herrero et al (2022) caracterizaron un macizo rocoso de piedra caliza en el norte de España a partir de un modelo 3D obtenido mediante el uso de fotografías tomadas desde el vuelo de un UAV. Los autores comentan que esta metodología permite obtener información fotogramétrica de forma rápida y económica.
Actualmente existen propuestas para introducir la tecnología de aprendizaje profundo en los marcos de generación de orto imágenes con UAV (Zhang et al., 2023).
Con el UAV Ebeeb SQ se generó un vuelo de calidad, corregido geométricamente, con una precisión de 2 mm a una resolución espacial de 3.69 cm/pixel.
Los productos topográficos resultantes del vuelo fotogramétrico consisten en: ortomosaico, Modelo Digital del Terreno, mapa de pendiente y Nube de puntos 3D.
El mapa de pendiente permitió cuantificar que solo es mecanizable, con criterios de seguridad, el 18 % del área total de trabajo.
La nube de puntos 3D permitió estimar la altura del dosel del cultivo con un 91 % de precisión respecto a los datos medidos en campo.
El tiempo de 85 minutos sumando captura y procesamiento de datos, la precisión del vuelo y la variedad de los productos generados pueden reportarse como ventajas del UAV, sobre las técnicas tradicionales para levantamientos topográficos.
Con base en los resultados obtenidos, es recomendable utilizar tecnología UAV como alternativa para la generación de información topográfica.
Carrivick, J. L., Smith, M. W. y Quincey, D. J. (2016). Structure from Motion in the Geosciences. John Wiley & Sons, 73(2), 1445-146. https://doi.org/10.1111/nzg.12161.
Cevallos, M. R., y L. Shkiliova. 2018. Desarrollo del programa “Mecanización agrícola comunitaria” en la provincia de Manabí, República de Ecuador. Revista Ingeniería Agrícola, 6(2), 45-50. https://cutt.ly/jQMFlMC.
CloudCompare (2021) View, edit and process. Disponible en:. https://www.cloudcompare.org/main.html.
Dai, W., Qian, W., Liu, A., Wang, C., Yang, X., Hu, G. y Tang, G. (2022). Monitoring and modeling sediment transport in space in small loess catchments using UAV-SfM photogrammetry. CATENA, 214, 106244 https://doi.org/10.1016/j.catena.2022.106244.
Gómez-Gutiérrez, Á., y Gonçalves, G. R. (2020). Surveying coastal cliffs using two UAV platforms (multirotor and fixed-wing) and three different approaches for the estimation of volumetric changes. International Journal of Remote Sensing, 41(21), 8143-8175. https://doi.org/10.1080/01431161.2020.1752950.
Gürtekin, E., y Gökçe, O. (2021). Estimation of erosion risk of Harebakayiş sub-watershed, Elazig, Turkey, using GIS based RUSLE model. Environmental Challenges, 5, 100315.https://doi.org/10.1016/j.envc.2021.100315.
Herrero, M. J., Pérez-Fortes, A. P., Escavy, J. I., Insua-Arévalo, J. M., De la Horra, R., López-Acevedo, F. y Trigos, L. (2022). 3D model generated from UAV photogrammetry and semi-automated rock mass characterization. Computers & Geosciences, 163, 105121. https://doi.org/10.1016/j.cageo.2022.105121.
Huang, G., Lv, G., Zhang, S., Huang, D., Zhao, L., Ni, X.,... y Liu, C. (2022). Numerical analysis of debris flows along the Sichuan-Tibet railway based on an improved 3D sphere DDA model and UAV-based photogrammetry. Engineering Geology, 106722. https://doi.org/10.1016/j.enggeo.2022.106722.
James, M. R. y Robson, S. (2012). Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. Journal of Geophysical Research: Earth Surface, 117(F3). https://doi.org/10.1029/2011JF002289.
Liu, Y., Fu, Y., Zhou, P., Zhuan, Y., Zhong, K. y Guan, B. (2020). A real-time 3D shape measurement with color texture using a monochromatic camera. Optics Communications, 474, 126088. https://doi.org/10.1016/j.optcom.2020.126088.
Lopes Bento, N., Araújo E Silva Ferraz, G., Alexandre Pena Barata, R., Santos Santana, L., Diennevan Souza Barbosa, B., Conti, L. y Rossi, G. (2022). Overlap influence in images obtained by an unmanned aerial vehicle on a digital terrain model of altimetric precision. European Journal of Remote Sensing, 55(1), 263-276. https://doi.org/10.1080/22797254.2022.2054028.
Lu, J., Cheng, D., Geng, C., Zhang, Z., Xiang, Y. y Hu, T. (2021). Combining plant height, canopy coverage and vegetation index from UAV-based RGB images to estimate leaf nitrogen concentration of summer maize. Biosystems Engineering, 202, 42-54. https://doi.org/10.1016/j.biosystemseng.2020.11.010.
Malamiri, H. R. G., Aliabad, F. A., Shojaei, S., Morad, M. y Band, S. S. (2021). A study on the use of UAV images to improve the separation accuracy of agricultural land areas. Computers and Electronics in Agriculture, 184, 106079. https://doi.org/10.1016/j.compag.2021.106079.
Martínez-Carricondo, P., Agüera-Vega, F. y Carvajal-Ramírez, F. (2020). Use of UAV-photogrammetry for quasi-vertical wall surveying. Remote Sensing, 12(14), 2221. https://doi.org/10.3390/rs12142221/.
Meinen, B. U., y Robinson, D. T. (2020). Mapping erosion and deposition in an agricultural landscape: Optimization of UAV image acquisition schemes for SfM-MVS. Remote Sensing of Environment, 239, 111666. https://doi.org/10.1016/j.rse.2020.111666.
Mello, C. C. de Sousa, Salim, D. H. C. y Simões, G. F. (2022). UAV-based landfill operation monitoring: A year of volume and topographic measurements. Waste Management, 137, 253-263. https://doi.org/10.1016/j.wasman.2021.11.020.
Mesas-Carrascosa, F. J., de Castro, A. I., Torres-Sánchez, J., Triviño-Tarradas, P., Jiménez-Brenes, F. M., García-Ferrer, A. y López-Granados, F. (2020). Classification of 3D point clouds using color vegetation indices for precision viticulture and digitizing applications. Remote Sensing, 12(2), 317. https://doi.org/10.3390/rs12020317.
Nesbit, P. R., Hubbard, S. M. y Hugenholtz, C. H. (2022). Direct Georeferencing UAV-SFM in High-Relief Topography: Accuracy Assessment and Alternative Ground Control Strategies Along Steep Inaccessible Rock Slopes. Remote Sensing, 14(3), 490. https://doi.org/10.3390/rs14030490.
Nesbit, P. R., Hubbard, S. M., Daniels, B. G., Bell, D., Englert, R. G. y Hugenholtz, C. H. (2021). Digital re‐evaluation of down‐dip channel‐fill architecture in deep‐water slope deposits: Multi‐scale perspectives from UAV‐SfM. The Depositional Record, 7(3), 480-499. https://doi.org/10.1002/dep2.137.
Pacheco Gil, H. A. (2012). Modelos digitales del terreno, variables hidrológicas y movimientos en masa, estado Vargas, Venezuela. Geoenseñanza, 17(1), 57-75. http://www.saber.ula.ve/handle/123456789/40243.
Parizi, E., Khojeh, S., Hosseini, S. M. y Moghadam, Y. J. (2022). Application of Unmanned Aerial Vehicle DEM in flood modeling and comparison with global DEMs: Case study of Atrak River Basin, Iran. Journal of Environmental Management, 317, 115492. https://doi.org/10.1016/j.jenvman.2022.115492.
Parrot Drone SAS. 2019. Parrot Sequoia. Manual de Especificaciones Técnicas. Disponible:https://www.senseflyacademy.com/start.
Pix4D SA. 2019. Pix4D Mapper. The leading photogrammetry software for professional drone mapping. Disponible en: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software.
SenseFly a Parrot Company. 2018. The advanced agricultural drone. Handbook. Disponible: https://my.sensefly.com/.
Stroner, M., Urban, R., Reindl, T., Seidl, J. y Brouček, J. (2020). Evaluation of the georeferencing accuracy of a photogrammetric model using a quadrocopter with onboard GNSS RTK. Sensors, 20(8), 2318. https://doi.org/10.3390/s20082318.
Teppati Losè, L., Chiabrando, F. y Giulio Tonolo, F. (2020). Are measured ground control points still required in UAV based large scale mapping? Assessing the positional accuracy of an RTK multi-rotor platform. International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences. https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLIII-B1-2020/507/2020/.
Tonkin, T. N., y Midgley, N. G. (2016). Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sensing, 8(9), 786. https://doi.org/10.3390/rs8090786.
Westoby, M. J., Brasington, J., Glasser, N. F., Hambrey, M. J. y Reynolds, J. M. (2012). ‘Structure-From-Motion’photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology, 179, 300-314. https://doi.org/10.1016/j.geomorph.2012.08.021.
Whelan, B. M., y McBratney, A. B. (2000). The “null hypothesis” of precision agriculture management. Precision Agriculture, 2(3), 265-279. https://link.springer.com/article/10.1023/A:1011838806489.
Wright, D., Dering, B., Martinovic, J. y Gheorghiu, E. (2020). Neural responses to dynamic adaptation reveal the dissociation between the processing of the shape of contours and textures. Cortex, 127, 78-93. https://doi.org/10.1016/j.cortex.2020.01.015.
Wu, B., Liu, W. C., Grumpe, A. y Wöhler, C. (2018). Construction of pixel-level resolution DEMs from monocular images by shape and albedo from shading constrained with low-resolution DEM. ISPRS journal of photogrammetry and remote sensing, 140, 3-19. https://doi.org/10.1016/j.isprsjprs.2017.03.007.
Zhang, W., Qi, J., Wan, P., Wang, H., Xie, D., Wang, X. y Yan, G. (2016). An easy-to-use airborne LiDAR data filtering method based on cloth simulation. Remote sensing, 8(6), 501. https://doi.org/10.3390/rs8060501.
Zhang, J., Xu, S., Zhao, Y., Sun, J., Xu, S. y Zhang, X. (2023). Aerial orthoimage generation for UAV remote sensing. Information Fusion, 89, 91-120. https://doi.org/10.1016/j.inffus.2022.08.007.
Zolkepli, M. F., Ishak, M. F., Yunus, M. Y. M., Zaini, M. S. I., Wahap, M. S., Yasin, A. M., ... y Hezmi, M. A. (2021). Application of unmanned aerial vehicle (UAV) for slope mapping at Pahang Matriculation College, Malaysia. Physics and Chemistry of the Earth, Parts A/B/C, 123, 103003. https://doi.org/10.1016/j.pce.2021.103003.