
Journal Information
Title: Enfoque UTE
Copyright: 2023, The Authors
Abbreviated Title: Enfoque UTE
Volume: 14
Issue: 2
ISSN (electronic): 1390-6542
Copyright statement: License (open-access, https://creativecommons.org/licenses/by/3.0/ec/):
Article Information
Date received: 1 December 2022
Date accepted: 27 January 2023
Publication date: 1 April 2023
Publication date: Abr. 2023
Pages: 52-65
DOI: https://doi.org/10.29019/enfoqueute.912
http://ingenieria.ute.edu.ec/enfoqueute/
Análisis numérico del funcionamiento de un Convertidor de Energía de las Olas (WEC) usando CFD
Numerical analysis of operation of a Wave Energy Converter (WEC) using CFD
Cristian Andrade-Terán1, Esteban Valencia2, Edgar Cando3
Resumen
El presente estudio analiza numéricamente, mediante CFD, el funcionamiento de un convertidor de energía de las olas WEC (por sus siglas en inglés) con condiciones de mar locales. La dinámica del dispositivo causada por la propagación de las olas fue caracterizada en el software comercial ANSYS Fluent, aplicando criterios de reducción de dominio, celdas estructuradas y malla dinámica con 6DOF. Realizando simulaciones a escala 1:5 de un dispositivo real instalado en altamar la predicción de la dinámica del fluido fue lograda con un error de entre 3.6 % y 4.7 % comparando la elevación de la superficie libre de las olas y entre 5 y 6 % en el desplazamiento angular del sólido en relación con el experimental. Para el análisis, del modelo INOCAR-SWAN se extrajo datos en puntos cercanos a Esmeraldas y al golfo de Guayaquil, detallando la factibilidad de generación de energía del dispositivo en estas zonas. Mejores resultados en cuanto a la dinámica del dispositivo fueron obtenidos en estados de mar en profundidad y períodos de olas más largos, presentando potencia mecánica promedio entre 0.165 kW y 0.22 kW.
Palabras clave
CFD; energías renovables; NTW; VOF; WEC
Abstract
The present study numerically analyzes, using CFD, the operation of a wave energy converter (WEC) with local sea conditions. The dynamics of the device caused by the propagation of the waves was characterized in the commercial software ANSYS Fluent applying domain reduction criteria, structured cells, and dynamic mesh with 6DOF. Performing 1:5 scale simulations of a real device installed offshore the prediction of the fluid dynamics was achieved with an error between 3.6 % and 4.7 % comparing the elevation of the free surface of the waves and between 5 and 6 % in the angular displacement of the solid in relation to the experimental. For the analysis, data was extracted from the INOCAR-SWAN model at points near Esmeraldas and the Gulf of Guayaquil, detailing the feasibility of generating energy from the device in these areas. Better results in terms of device dynamics were obtained in sea states with greater depth and longer wave periods, presenting average mechanical power between 0.165 kW and 0.22 kW.
Keywords
CFD; NTW; renewable Energy; VOF; WEC
1. Introducción
La capacidad de producir energía a partir de recursos renovables es una línea de investigación en creciente desarrollo, la cual busca dejar la dependencia de recursos fósiles y tecnologías que contaminan al medioambiente. Enmarcados en el Objetivo de Desarrollo Sostenible (ODS) 7 para energía asequible y no contaminante, la energía proveniente de mares y océanos posee un enorme potencial que podría ser explotado de una manera más eficiente y económica. Además, los patrones existentes en el océano son más predecibles que otras fuentes de energía renovables de naturaleza estocástica (Bellec, 2017). Sin embargo, es necesario que en los próximos años exista un crecimiento acelerado en cuanto a tecnología para que este tipo de energía contribuya de forma importante en el cuidado ambiental y el desarrollo sostenible (Chowdhury et al., 2021). La implementación de modelos matemáticos y simulación numérica para diseñar y predecir el funcionamiento de mecanismos de transformación de energía es una técnica muy utilizada en la actualidad, ayudando a mejorar la eficiencia y rendimiento de estos.
Con el objetivo de modelar y predecir el comportamiento de las olas en el mar se crean los llamados Numerical Wave Tanks (NWT), herramienta que con una creciente accesibilidad a dispositivos con alto poder computacional se vuelve muy útil en la ingeniería marina para diversos campos de estudio (Marques et al., 2018). Estos proporcionan una valiosa herramienta de pruebas en la experimentación y optimización de dispositivos generadores de energía, además de ser de alta fiabilidad cuentan con una buena rentabilidad por no requerir de costos de instalación física. De acuerdo con Windt et al. (2018) con la tecnología en constante crecimiento, los modelos numéricos pueden ser mejorados y optimizados para reducir tiempo de simulación y costo computacional.
Varios estudios han utilizado la dinámica de fluidos computacional para desarrollar modelos numéricos para dichos tanques. Alamian et al. (2015) presentaron un modelo de tanque de olas para estudiar olas regulares generadas por un pistón en un tanque 2D, por medio del método BEM, el cual ayudó mucho para calibrar tanques experimentales. Kim et al. (2016) utilizando CFD realizaron estudios de cargas de olas sobre estructuras submarinas fijas, implementando un NWT con gran éxito. Bruinsma et al. (2018) estudiaron la interacción fluido-estructura para estructuras flotantes con amarre. Para esto utilizaron un NTW donde la propagación se realizó mediante teoría de olas Lineal y 2nd Order Stokes. Otros estudios se centraron en optimizar tanques numéricos para mejorar la predicción del comportamiento de las olas al implementar diferentes técnicas de simulación y de mallado (Sun et al, 2016; Penalba et al, 2018; Chen, et al., 2019). En los últimos años se han utilizado modelos CFD para caracterizar la interacción fluido-sólido en dispositivos de generación energía que utilizan aire, con resultados satisfactorios y que han ayudado en el diseño de dichos mecanismos (Andrade-Terán, 2022; Rodríguez et al, 2021).
En el estudio de convertidores de energía a partir de las olas llamados ‘dispositivos WEC’, por sus siglas en inglés (Wave Energy Converter), en español denominados ‘tecnología undimotriz’; los NWT se introducen como una técnica útil y fiable para simular el funcionamiento de los convertidores. Zhi et al. (2018) aplicaron la técnica de NWT en el estudio del funcionamiento de un Overtopping Wave Energy Converter (OWEC) utilizando CFD con olas regulares mostrando resultados con alta fiabilidad respecto al experimental. E. J. Ransley ha participado en múltiples estudios (Ransley, 2015; Ransley, Greaves, Raby, Simmonds y Hann, 2017; Ransley, et al., 2017) de modelos numéricos para predecir el funcionamiento de WEC en diferentes condiciones. En dichos estudios se utilizaron modelos con malla dinámica aplicando 6DOF y modelos multifásicos VOF para la interacción aire-agua en el tanque numérico, tomando como principal modelo de WEC el WaveStar Machine uno de los dispositivos más prometedores para la transformación de energía a partir de las olas, que fue ideado en el año 2000 por los entusiastas de la navegación Niels and Keld Hansen y que ha sido desarrollado constantemente en las últimas décadas (Piera, 2019). Sin embargo, en Latinoamérica han sido escasos los estudios referentes a este tipo de tecnología y esfuerzos por asimilar propuestas existentes. Por lo tanto, el propósito de este estudio es realizar simulaciones de la dinámica existente cuando interactúa el WEC del tipo WaveStar Machine con un flujo de olas controlado, para predecir el funcionamiento del convertidor en condiciones típicas de la región.
2. Metodología
Para analizar la interacción fluido-sólido en la transformación de energía proveniente de las olas, se reproduce un modelo numérico CFD basado en el modelo físico instalado en Coast Ocean Wave Basin (Uneversity of Plymouth, 2021) escalado 1:5. Del modelo operacional INOCAR-SWAN (Instituto Oceanográfico de la Armada del Ecuador, 2022) se obtienen datos típicos de estados de mar en las costas ecuatorianas, para ser estudiados. Varios períodos de olas son simulados partiendo del reposo, para analizar la evolución en el tiempo del flujo y el desplazamiento que se provoca en el WEC por los diferentes estados de olas.
2.1 Geometría dispositivo y tanque de olas
Las pruebas se realizan tomando como dispositivo generador un WEC del tipo Wavestar Machine, el cual consiste en un absorbedor flotante hemisférico, un pistón hidráulico, un rotor y una estructura fija al fondo del mar o a una plataforma flotante (Jakobsen et al., 2016). El movimiento del flotador mientras sube y baja por las olas se transfiere a través de la hidráulica al rotor para producir electricidad (Kramer, Laurent y Peter, 2011). La geometría del dispositivo utilizada se basa en el modelo instalado en la Universidad Plymouth con las dimensiones descritas en los trabajos de Ransley et al. (2017) y de Windt et al. (2020) de un brazo simple del Wavestar Machine, como muestra la figura 1.
Figura 1. Dimensiones y ángulos de interés de un brazo del WEC tipo Wavestar Machine
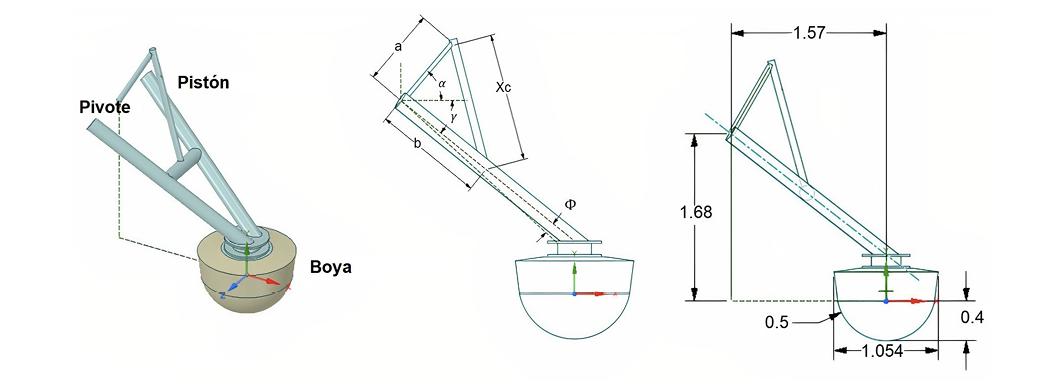
El dispositivo mecánicamente opera bajo las siguientes condiciones físicas y mecánicas (se toma como origen de coordenadas el centro geométrico de la boya):
- Centro de gravedad: (-0.17; 0.35; 0) m
- Centro de rotación: (-1.57; 1.68;0) m
- Masa total: 220 kg
- Inercia aproximada:124 kg m2
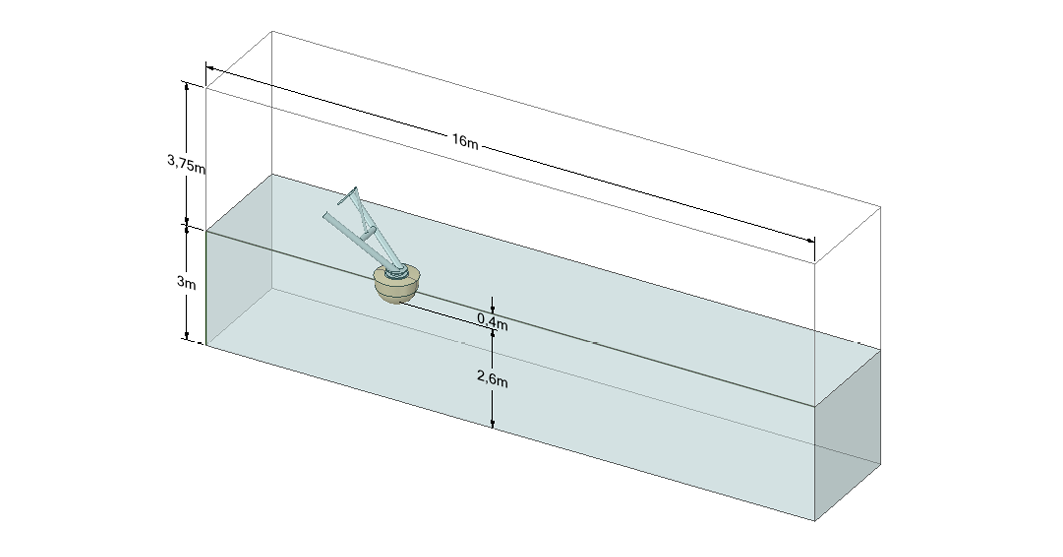
El tanque de olas, figura 2, donde se colocará el WEC para las simulaciones geométricamente es modelado con las siguientes dimensiones: 16 m de largo, 3 m de profundidad, 3.75 m de altura libre y 6 m de ancho. El dominio computacional del tanque es simplificado implementado un eje de simetría en la dirección de no incidencia de las olas. El sistema de conversión de energía será dispuesto en el tanque numérico, aplicando la simplificación propuesta por Windt et al. (2020) donde se coloca geométricamente solo la boya flotante, ya que es la única parte del WEC que entra en contacto directamente con el fluido; esta se encuentra instalada estratégicamente 4.97 m de la entrada del flujo y 2.6 m del fondo del tanque en la posición de flotabilidad estable, 0.4 m de la boya sumergida.
Figura 2. Geometría del tanque de Olas Simulado
2.3 Simulación numérica
Numéricamente se modela la propagación de olas sobre el dispositivo generador de energía simulando la interacción fluido-solido. Inicialmente el WEC es fijado en la posición de flotabilidad estable para simular el flujo de olas con la boya como obstáculo, para así conseguir datos necesarios para validar la dinámica del fluido y optimizar el cálculo del NWT. Luego se habilita un único grado de libertad rotacional en el eje z al WEC, para simular el movimiento que causan las olas al sólido.
2.3.1 Ecuaciones de gobierno
El flujo transitorio en el NWT es resuelto por simulación numérica directa (DNS) mediante ecuaciones de conservación de masa (Ecuación 1) y de cantidad movimiento (Ecuación 2) para flujo laminar.


Además, un modelo multifásico de volumen de fluido (VOF) es utilizado para caracterizar la interacción de las fases (aire-agua) en la superficie libre en donde se tiene α = 1 cuando la celda está llena de agua y α = 0 llena de aire. La ecuación 3 es la que rige la variación de fracción de volumen.

Donde:
 :es la presión estática [Pa]
:es la presión estática [Pa] 
 : son las fuerzas gravitacionales y fuerzas externas ejercidas [N] .
: son las fuerzas gravitacionales y fuerzas externas ejercidas [N] .
 : velocidad del fluido [m/s] .
: velocidad del fluido [m/s] .
 : densidad [kg/m3].
: densidad [kg/m3].
t: tiempo [s].
 : fracción de volumen.
: fracción de volumen.
 : viscosidad del fluido [Pa s].
: viscosidad del fluido [Pa s].
La teoría Second Order Stokes es utilizada para la generación de olas en el modelo multifásico VOF, esta se rige por la ecuación diferencial parcial de Laplace, ecuación 4 (Maâtoug y Ayadi, 2016).

Donde:
X: coordenada horizontal de incidencia directa para la ola
 : número de ola angular [rad/m],
: número de ola angular [rad/m],  = (
= ( donde
donde  es la longitud de ola
es la longitud de ola
 : corresponde a la inclinación de la ola [rad].
: corresponde a la inclinación de la ola [rad].
 : fracción de volumen.
: fracción de volumen.
Dinámica del sólido
La teoría 6DOF calcula movimientos tridimensionales a partir de las fuerzas y momentos aplicados a la superficie (ANSYS Inc., 2013). El movimiento del WEC en el tanque se modela limitando a un único grado de libertad rotacional con respecto al eje Z, la expresión que rige esta teoría está descrita por la ecuación 5.

Donde:
 : es el tensor de inercia.
: es el tensor de inercia.
 : el vector de momento del cuerpo [Nm].
: el vector de momento del cuerpo [Nm].
 es la velocidad angular del cuerpo [rad/s].
es la velocidad angular del cuerpo [rad/s].
2.3.2 Malla
La malla propuesta presenta refinamiento en el área de influencia de las olas y las zonas cercanas al sólido para lograr mejor precisión del flujo y disminuir la cantidad de celdas necesarias para caracterizar el fenómeno. Esta se construye mediante celdas hexaédricas estructuradas mediante la técnica de mallado por bloques utilizando ANSYS ICEM CFD, la malla obtenida es mostrada en la figura 3.
Figura 3. Malla utilizada para la simulación del tanque con el WEC instalado
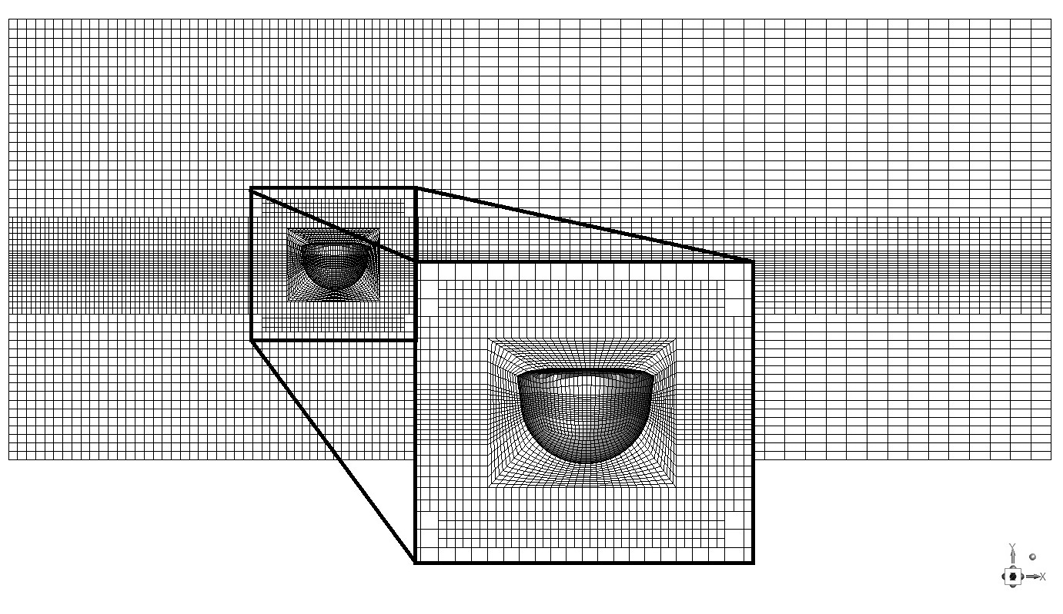
Virtualmente se establece una región de malla deformable suficiente para un libre movimiento de la boya y otra región con las celdas cercanas al sólido que siguen el movimiento pasivamente sin deformarse. Aplicando técnicas de Smoothing y Layering se permite la deformación de las celdas con el movimiento de la boya, sin perder la calidad de la malla. La discretización estructurada por bloques permite calidad alta en la malla, donde únicamente el 0.006 % son celdas con calidad mínima de entre 0.35 a 0.5, el resto de la malla presenta calidad superior a 0.55; estas celdas poseen un índice de ortogonalidad superior al 0.49. La independencia de malla se realizó monitoreando un punto en el dominio del NTW aguas arriba de la boya, logrando independencia en cuanto a presión en el punto monitoreado con una malla con 239 832 celdas y 256 779 nodos.
2.3.3 Configuración de solución
Las simulaciones CFD han sido resueltas utilizando ANSYS Fluent con doble precisión para control de decimales. El método utilizado para el acople Presión-Velocidad en el esquema PISO (Pressure-Implicit with Splitting of Operators) activando skewnnes-neighbor con correcciones, para mejorar la convergencia cuando se deforme la malla. En la discretización espacial se empleó: el esquema PRESTO! para la presión, Second Order Upwind para el momento y un esquema Compresive para la discretización de la fracción de volumen. La pared superior del tanque se establece como salida libre a la presión atmosférica, simulando un tanque abierto. Para la condición de entrada se activa la teoría de OpenWave, estableciendo un estado inicial tipo Flat para un tanque sin olas al iniciar la simulación. La superficie libre del líquido en 0 m y el fondo del tanque a -3 m permitiendo 3.75 m para el flujo e interacción del aire. La condición de salida del flujo se establece con Pressure-outlet activando Open Chanel manteniendo el fondo del tanque a -3 m y nivel de agua en 0 m.
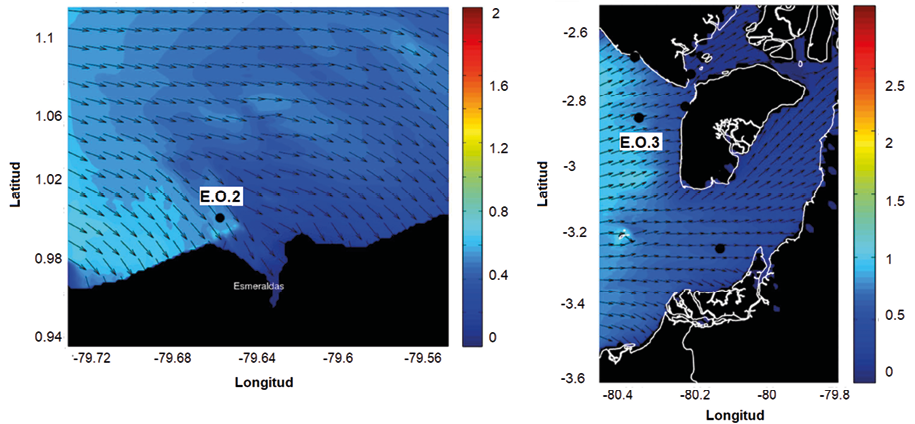
Las condiciones para E.O.2 y E.O.3 son escaladas 1:5 de los datos reales obtenidos tanto para la altura significativa como para el período promedio de los estados de mar típicos durante el mes de abril. Datos recolectados de las boyas virtuales en las zonas cercanas a las costas de Esmeraldas y al golfo de Guayaquil, respectivamente, figura 4.
Figura 4. Puntos del modelo INOCAR-SWAN utilizados para estados de oleaje E.O.2 y E.O.3
Los estados de oleaje utilizados, enlistados en la tabla 2, se establecen en las condiciones de contorno mediante Second Orden Stokes parametrizando las condiciones de mar necesarias.
Tabla 1. Condiciones de oleaje para las pruebas escaladas del modelo INOCAR-SWAM
|
Tipo |
Altura de las olas (H) |
Longitud ( |
Período (T) |
|
|
Estado de control |
E.O. 1 |
0.15 m |
3.06 m |
1.4 s |
|
Boya Esmeraldas |
E.O. 2 |
0.11 m |
4 m |
1.5 s |
|
Boya G. Guayaquil |
E.O. 3 |
0.18 m |
1.5 m |
0.98 s |
|
|
|
|
|
|
 )
)2.4 Transmisión del movimiento
Con el WEC libre se controla un grado de libertad rotacional al registras la posición angular ( del centro de gravedad de toda la estructura cada time step respecto de la posición inicial del WEC. Dicho moviente de la boya provoca el desplazamiento del cilindro hidráulico (Xc) el cual se comprime y se extiende con el flujo de las olas transmitiendo aceite a presión al rotor. La ecuación 5, es la utilizada para trasladar geométricamente el movimiento de la boya hacia el pistón hidráulico. Las dimensiones y ángulos de interés considerados en el cálculo están presentados en la figura 1.
del centro de gravedad de toda la estructura cada time step respecto de la posición inicial del WEC. Dicho moviente de la boya provoca el desplazamiento del cilindro hidráulico (Xc) el cual se comprime y se extiende con el flujo de las olas transmitiendo aceite a presión al rotor. La ecuación 5, es la utilizada para trasladar geométricamente el movimiento de la boya hacia el pistón hidráulico. Las dimensiones y ángulos de interés considerados en el cálculo están presentados en la figura 1.

Donde:
a= 1.385 [m]
b= 0.89728 [m]
 = 5.23°
= 5.23°
 = 71°
= 71°
 = 38.1° +
= 38.1° + 
 =
= 
 = +
= + 
3. Resultados y discusión
El tanque inicialmente con aguas tranquilas con la boya en su estado estable de flotabilidad es irradiado con olas durante 10s, logrando extender la propagación de las olas a lo largo de todo el tanque, necesario para analizar la dinámica del conjunto fluido-solido.
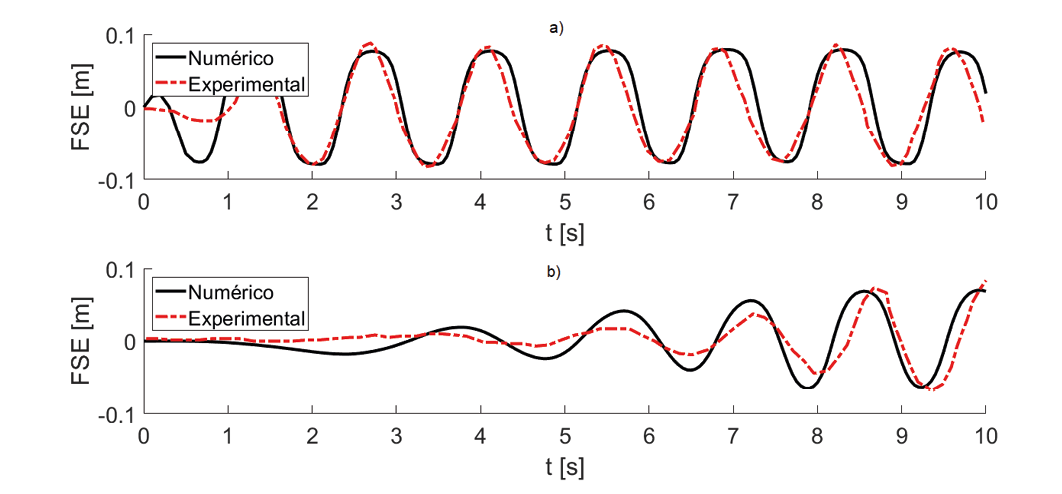
3.1. Validación
La elevación de la superficie libre (FSE), a través del tiempo del WEC fijado en la posición estable, simulando el estado E.O. 1 obtenida de la simulación numérica es comparada con las pruebas de flujo realizadas experimentalmente, como se muestra en la figura 5. Se toma como puntos de control dos puntos del dominio computacional, los cuales se encuentran a 4.77 m aguas arriba (figura 5a) y 2.04 m aguas abajo (figura 5b) respecto al centro geométrico de la boya. En rojo entrecortado se encuentran los datos del estudio experimental y en línea negra continua, datos del numérico realizado en el presente estudio.
Se puede observar que las curvas obtenidas son muy similares a las presentadas a partir de las pruebas experimentales, demostrando que todas las simplificaciones realizadas al modelo numérico no disminuyen la precisión y confiabilidad del cálculo. Los resultados presentan un error de predicción respecto al modelo experimental de entre 3.6 y 4.7 % en el flujo de olas E.O. 1, comparando los máximos y mínimos de los valores obtenidos. La propagación de las olas hasta encontrarse con la boya muestra una congruencia temporal de décimas de segundo, variación de altura de olas de menos de 1 cm y luego de la boya la dispersión es mínima siendo el error de flujo aceptable para el estudio.
Figura 5. FSE numérico y experimental: a) aguas arriba, b) aguas abajo
La ecuación 5 es aplicada para calcular el desplazamiento del cilindro hidráulico Xc, transformando el desplazamiento angular libre de la estructura, a un solo punto de absorción de energía. La figura 6, presenta una comparación de los datos obtenidos para el desplazamiento del cilindro en la simulación E.O. 1 con los datos del experimental (Ransley et al., 2017).
Figura 6. Desplazamiento del cilindro pistón Xc, experimental y numérico
-web-resources/image/Captura_de_Pantalla_2023-04-16_a_la(s)_12.23.27.png)
El desplazamiento del cilindro Xc en el numérico muestra un ligero desfase temporal respecto al experimental, en cuanto a la amplitud existe un error máximo del 6 %. En un lapso aproximado de 3s, los resultados oscilan de una forma irregular, esto se debe a que el dispositivo no alcanza la estabilidad al iniciar la simulación (Ransley et al., 2017).
3.2 Respuesta del dispositivo a diferentes estados de olas
El libre movimiento del brazo del WEC con centro de giro en el punto pivote por la interacción con el fluido es ilustrado en la figura 7, donde se establece una isosurface bajo el criterio VOF= 0,5. Esta representa la elevación de la superficie libre del agua (FSE), mostrando contornos de velocidad del fluido alrededor de la boya.
Figura 7. Contornos de velocidad: a) Reposo, b) E.O. 1, c) E.O.2 y d) E.O.3
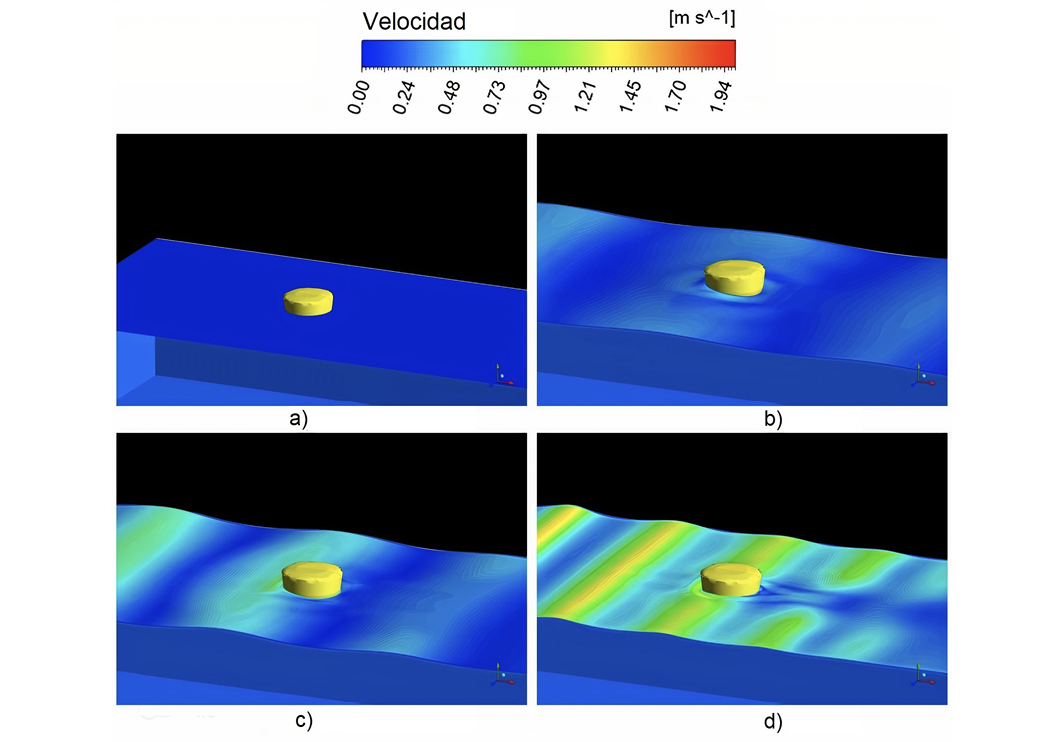
Como se observa en la figura 7, existe mayor velocidad de flujo en el estado de olas 3 (E.O. 3) donde existe mayor altura en las olas con períodos más cortos. Para los estados 1 y 2 (E.O. 2) se observa flujo con menor velocidad, donde la altura de las olas es menor en períodos más largos. Sin embargo, el desplazamiento que provocan los estados E.O.1 y E.O.2 son superiores a los provocados por las olas del E.O.3, como lo demuestra la gráfica en la figura 8. Esto podría deberse a que un flujo muy rápido no permite desarrollar completamente la propagación de la ola. Períodos muy bajos provocan desorden en las olas, mientras que períodos largos permiten a la ola mantener mayor energía mientras se desplazan (Kayac Autovaciable, 2019).
La respuesta del dispositivo, al impacto de las Olas sobre la boya, se ve reflejado en el desplazamiento angular (θ) del brazo del WEC con respecto al punto pivote. Durante las simulaciones se ha registrado a través del tiempo este desplazamiento (figura 8), partiendo desde el punto de flotabilidad estable se presenta la oscilación del brazo para cada prueba durante los 10 s simulados.
Figura 8. Desplazamiento angular del centro de gravedad respecto al punto pivote
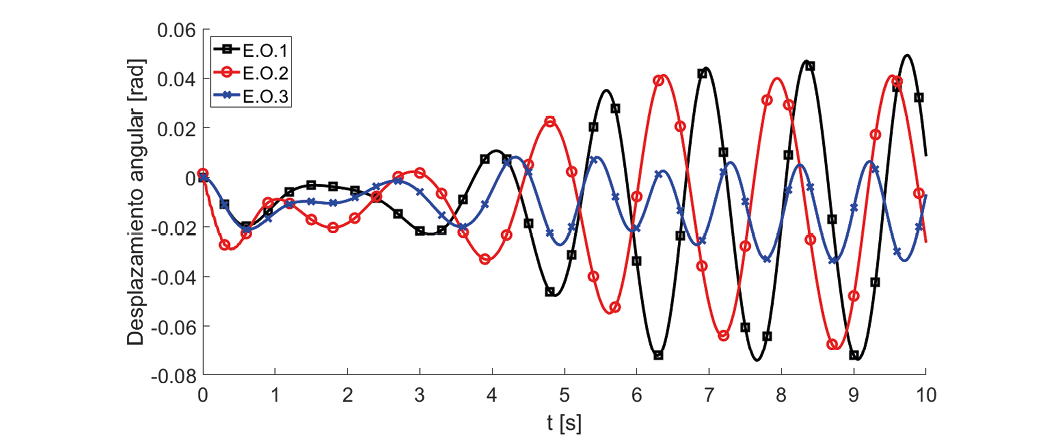
Estos resultados sugieren mejor desempeño del convertidor con los estados 1 y 2, los cuales presentan olas con períodos más largos. Asimismo, este desplazamiento angular es trasladado al movimiento lineal del cilindro hidráulico (Ecuación 5), donde se denota mejor transformación de energía desde las olas en E.O.1 y E.O.2 que en E.O.3. La figura 9 muestra el desplazamiento que se genera en el cilindro hidráulico Xc, en respuesta al movimiento del WEC provocado por el paso de los diferentes tipos de olas estudiadas, denotando las condiciones más favorables para la transformación de la energía a partir de las olas.
Figura 9. Desplazamiento del cilindro hidráulico Xc para estados E.O.1, E.O.2 y E.O.3
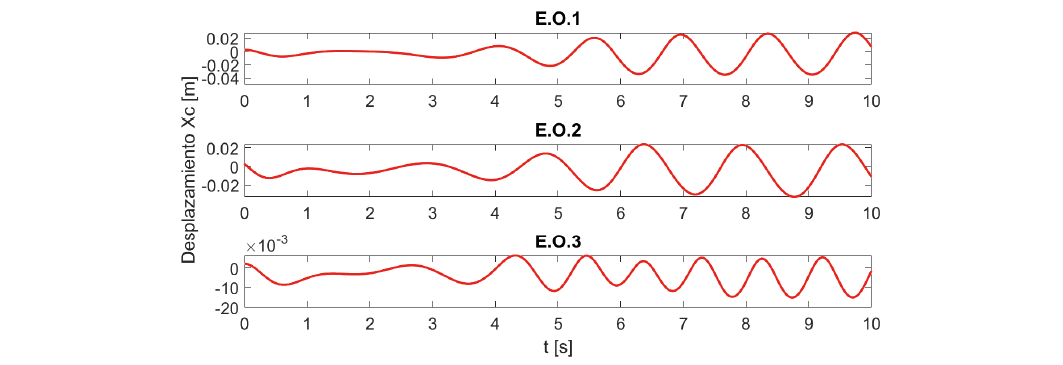
El flujo de olas E.O.2 provoca un desplazamiento del pistón Xc en promedio 5.5 % superior al dato del estado de control E.O.1, significando energéticamente una potencia superior en dicho porcentaje por cada flotador que se instale en el sistema del WEC. Por otro lado, el estado E.O.3 muestra un decaimiento en promedio del 67 % en la dinámica del pistón absorbedor por lo que se reduciría significativamente la potencia hidráulica del mismo.
3.3 Transferencia de energía
La potencia (Po), por metro de columna de agua, existente en los estados de mar estudiados se calculan utilizando la ecuación 6 (Perez, 2018). La potencia mecánica en el brazo del WEC en respuesta, es calculado aplicando la ecuación 7, considerando el valor del momento (M) ejercido respecto al punto pivote y la velocidad angular del brazo analizada a partir del desplazamiento (Fernández et al., 2018).


Donde:
H: Altura de Ola.
T: Período de Ola.
La tabla 2 presenta la potencia disponible de las olas en los estados E.O.1, E.O.2 y E.O.3 y la potencia mecánica del brazo del WEC provocada por dichos estados.
Tabla 2. Potencial disponible a partir de las olas
|
Tipo |
Potencia disponible (PO) |
Desplazamiento máximo provocado |
Potencia mecánica (PM) |
|
E.O. 1 |
0.31 kW/m |
0.07 rad |
0.22 Kw |
|
E.O. 2 |
0.17 kW/m |
0.06 rad |
0.165 Kw |
|
E.O. 3 |
0.31 kW/m |
0.03 rad |
0.08 Kw |
|
|
|
|
|
El dispositivo con el estado de mar E.O.3 presenta menor potencia mecánica a pesar de existir propagación de olas con altura significativa superior al resto. El estado de mar E.O.2 aporta una de potencia de oleaje inferior, sin embargo, la potencia mecánica generada en el brazo del WEC para este estado es 50 % superior a la existente con el estado E.O.3.
5. Conclusiones y recomendaciones
La metodología de simulación numérica utilizada permitió obtener alta precisión en los resultados del desplazamiento del sólido y mínima distorsión en la propagación de las olas. Obteniendo así resultados con alta fiabilidad en el estudio del funcionamiento del WEC, presentando un error de predicción de milímetros en la propagación de las olas y de 1 a 2 cm en la dinámica del pistón actuador. Esta precisión en los resultados permitió analizar la generación de energía que se conseguiría con el WEC funcionando bajo las condiciones en las costas de Ecuador.
Las simulaciones denotan que el flujo de olas con altura significativa alta y períodos más largos favorecen la transformación de energía undimotriz. El mayor desplazamiento del pistón absorbedor de energía en los estados E.O.1 y E.O.2 lo demuestran. En estos, el brazo del WEC presenta un desarrollo completo de la dinámica con desplazamiento angular entre 3 y 4 ° y hasta 4 cm de desplazamiento en el cilindro hidráulico a escala 1:5. También se observa que, a pesar de presentar una alta disponibilidad energética proveniente de las olas, un estado de mar con flujo muy rápido (olas de períodos cortos y altura pronunciada) no asegura la generación de energía elevada. Estos estados ocurren en puntos con poca profundidad de mar, como lo es el punto estudiado cerca al golfo de Guayaquil, presentando aproximadamente un 50 % de potencia mecánica inferior al punto en la Costa de Esmeraldas.
Es recomendable realizar más estudios de funcionamiento, replicando el presente estudio, en diferentes zonas de la región en Sudamérica para poder empezar a explotar el potencial existente en los océanos y mares. A la par es necesario realizar estudios del impacto que causaría el dispositivo al ecosistema donde se lo instale, ya que le principal objetivo es desarrollar dispositivos de generación de energía con mínimo impacto ambiental.
Bibliografía
Alamian, R., Shafaghat, R. y Ketabdari, M. (2015). Wave simulation in a numerical wave tank, using BEM. AIP Conf. Proc., I(1648), https://doi.org/10.1063/1.4912978/
Andrade-Terán, C. (2022). Simulación numérica de la interacción fluido-estructura para predecir la respuesta de aerogeneradores sin palas a vibraciones inducidas por el viento en ciudades compactas. Enfoque UTE, 13(2), 1-16. https://doi.org/10.29019/enfoqueute.796
ANSYS Inc. (2013). ANSYS Fluent Theory Guide. U.S.A. Southpointe.
Bellec, M. (2017, septiembre 28). Wave vs tidal energy: new developments in hydropower. (E. McDonnell, Ed.) Conect Global. Retrieved from https://medium.com/@CUBEConnects/wave-vs-tidal-energy-new-developments-in-hydropower-e23382ad5ef/
Bruinsma, N., Paulsen, N. y Jacobsen, N. (2018). Validation and application of a fully nonlinear numerical wave tank for simulating floating offshore wind turbines. Ocean Engineering, 147, 647-658. doi:10.1016/j.oceaneng.2017.09.054/
Chen, H., Qian, K., Zhihua, M., Wei, B., Ye, L., Derek, C. y Clive, M. (2019). Application of an overset mesh based numerical wave tank for modelling realistic free-surface hydrodynamic problems. Ocean Engineering, 97-117. doi:10.1016/j.oceaneng.2019.02.001/
Chowdhury, M., Rahman, K. y Selvanathan, V. e. (2021). Current trends and prospects of tidal energy technology. Environment, Development and Sustainability (23), 8179-8194. doi:10.1007/s10668-020-01013-4/
COAST Laboratory. (2021). Ocean Basin. (Uneversity of Plymouth) Recuperado el Febrero de 2021, de COAST Laboratory-Facilities: https://www.plymouth.ac.uk/schools/school-of-engineering-computing-and-mathematics/coast-laboratory/coast-laboratory-facilities
Fernández, Z. F., Rincon, A., Ayuso, J., Hernández, R., & Cueto, J. L. (2018). Metodología para medir la potencia absorbida en el eje z del sistema mano-brazo debida a impactos. Cadiz: XI Congreso Iberoamericano de Acústica; X Congreso Ibérico de Acústica; 49º Congreso Español de Acústica -TECNIACUSTICA’18.
Jakobsen, M., Scott, B., Iglesias, G. y Kramera, M. (2016). Characterization of loads on a hemispherical point absorber wave energy converter. International Journal of Marine Energy, 13, 1-15. doi:10.1016/j.ijome.2016.01.003/
Kayac Autovaciable. (2019, Octubre 15). Que es y cómo afecta el período a las olas. Retrieved from https://kayakautovaciable.com.ar/meteorologia/que-es-y-como-afecta-el-periodo-a-las-olas/
Kim, S., Kim, K., Park, J., Jeon, G. y Chun, H. (2016). Numerical simulation of wave and current interaction with a fixed offshore substructure. International Journal of Naval Architecture and Ocean Engineering, 8(2), 188-197. doi:10.1016/j.ijnaoe.2016.02.002/
Kramer, M., Marquis, L. y Frigaard, P. (2011). Performance Evaluation of the Wavestar
Prototype. En A. S. Bahaj (Ed.), 9th ewtec 2011: Proceedings of the 9th European Wave and Tidal Conference, Southampton, UK, 5th-9th September 2011 University of Southampton.
Maâtoug, A. M. y Ayadi, M. (2016). Numerical simulation of the second-order Stokes theory using finite difference method. Alexandria Engineering Journal, 55(3), 3005-3013. doi:10.1016/j.aej.2016.04.035/
Marques, F., Gameiro, A. y Ferreira, A. (2018). Numerical simulation of regular waves: Optimization of a numerical wave tank. Ocean Engineering, 170, 89-99. doi:10.1016/j.oceaneng.2018.10.002/
Penalba, M., Davidson, J., Windt, C. y Ringwood, J. V. (2018). A high-fidelity wave-to-wire simulation platform for wave energy converters: Coupled numerical wave tank and power take-off models. Applied Energy, 655-669. doi:10.1016/j.apenergy.2018.06.008/
Perez, J. (2018). Cuantificación del potencial energético undimotriz en las costas del Caribe colombiano. Espacios, 39, 8. doi:10.17081/invinno.5.2.2758/
Piera, V. (2019, September). Wavestar, the platform that create clean energy from the waves. Retrieved from SmartGreen Post.
Ransley, E., Greaves, D., Raby, A., Simmonds, D., Jakobsen, M., & Kramer, M. (2017). RANS-VOF modelling of the wavestar point absorber. Renew Energy(109), 49-65. doi:10.1016/j.renene.2017.02.079
Ransley, E. (2015). Survivability of wave energy converter and mooring coupledsysyem using cfd (Ph.D. thesis). School of Marine Science and Engineeting,Univeristy of Plymouth.
Ransley, E., Greaves, D., Raby, A., Simmonds, D., & Hann, M. (2017). Survivability of wave energy converters using CFD. Renew Energy (109), 235-247. doi:10.1016/j.renene.2017.03.003/
Rodríguez, C. V., Ríos, A. y Luyo, J. E. (2021). CFD Design of Urban Wind Turbines: A Review and Critical Analysis. International Journal of Renewable Energy Research (IJRER), 11(2), 618-637.
SAT-INOCAR. (Abril de 2022). INOCAR-SWAM. (Instituto oceanográfico de la armada del Ecuador) Obtenido de https://www.inocar.mil.ec/modelo_olas/index.php/
Sun, L., Zang, J., Chen, L., Eatock, R. y Taylor, P. (2016). Regular waves onto a truncated circular column: A comparison of experiments and simulations. Applied Ocean Research, 650-662. doi:10.1016/j.apor.2016.03.011/
Windt, C., Davidson, J. y Ringwood, J. V. (2018). High-fidelity numerical modelling of ocean wave energy systems: A review of computational fluid dynamics-based numerical wave tanks. Renewable and Sustainable Energy Reviews, 93, 610-630. doi:10.1016/j.rser.2018.05.020/
Windt, C., Davidson, J., Ransley, E. J. y Greaves, D. (2020). Validation of a CFD-based numerical wave tank model for the power production assessment of the wavestar ocean wave energy converter. Renewable Energy (146), 2499-2516. doi:10.1016/j.renene.2019.08.059/
Zhi, H., Zhen, L. y Hongda, S. (2018). Numerical study on overtopping performance of a multi-level breakwater for wave energy conversion. Ocean Engineering, 150, 94-101. doi:10.1016/j.oceaneng.2017.12.058/0
1 Escuela Politécnica Nacional, EPN, Departamento de Ingeniería Mecánica, Quito-Ecuador [cristian.andrade01@epn.edu.ec, https://orcid.org/0000-0002-0220-7481].
2 Escuela Politécnica Nacional, EPN, Departamento de Ingeniería Mecánica, Quito-Ecuador [esteban.valencia@epn.edu.ec, https://orcid.org/0000-0002-6496-9908].
3 Escuela Politécnica Nacional, EPN, Departamento de Ingeniería Mecánica, Quito-Ecuador [edgar.cando@epn.edu.ec, https://orcid.org/0000-0002-8738-7994].
4 Universidad Internacional del Ecuador, UIDE, Escuela de Ingeniería Mecatrónica, Quito, Ecuador. [edgar.cando@epn.edu.ec, https://orcid.org/0000-0002-8738-7994].